ว่าไงทุกคน!
เป็นไงบ้างวะ? ยังไม่ตายเพราะวิชาโปรเจคใช่ไหม?
เคยสงสัยมั้ยว่าจะทำถังขยะอัจฉริยะที่คอยรายงานระดับขยะยังไง..??
รุ่นพี่กลับมาพร้อมกับโปรเจคแนวนี้แหละ
ในวิดีโอนี้พี่ทำ Smart Dustbin ที่เปิด-ปิดฝาเองได้ แถมยังวัดระดับขยะและแสดงผลบนหน้าจอ LCD อีกต่างหาก
โปรเจคนี้เป็นประโยชน์มากสำหรับน้องๆ วิศวะหรือเด็กช่างเลย สามารถเอาไปทำส่งอาจารย์ หรือทำโปรเจคจบก็ยังได้
ดูวิดีโอให้จบนะ แล้วอย่าลืมกดติดตามช่องยูทูปพี่ด้วย
"ช่วยพี่ให้ถึงฝัน... 1K ซับหน่อยยย"
โปรเจคนี้คือ Masterclass ระดับเทพ ในการควบคุมการทำงานอัตโนมัติและระบบเซนเซอร์วัดปริมาตรเลยทีเดียว Smart Dustbin ตัวนี้คือ ทรัพย์สินด้านสุขอนามัยประสิทธิภาพสูง ออกแบบมาเพื่อจัดการขยะระดับมืออาชีพ ด้วยการใช้ ระบบตรวจจับอัลตราโซนิกคู่ และ ลอจิกควบคุมเซอร์โว โปรเจคนี้จะพาน้องไปสร้าง "ศูนย์บัญชาการจัดการขยะ" ที่สามารถควบคุมการเปิด-ปิดฝาแบบเรียลไทม์ และแสดงข้อมูลระดับขยะได้อย่างแม่นยำและเสถียรระดับโรงงานอุตสาหกรรม
ภาพรวมโครงสร้างพื้นฐานและสถาปัตยกรรมลอจิก
เฟรมเวิร์กการจัดการ ทำงานผ่านวงจรชีวิตพิเศษแบบ ตรวจจับ-คำนวณ-สั่งการ ระบบสร้างขึ้นบน โมเดล Ping-to-Servo ที่มีความน่าเชื่อถือสูง:
- ฮับตรวจจับอัลตราโซนิกคู่: หรือ "โหนดวิเคราะห์ระยะทาง" มอนิเตอร์เฉพาะ ค่าเดลต้าของเวลาเดินทางของเสียง (รอบ Trigger/Echo) ระบบจะหาจุด การวัดที่แม่นยำ 100% สำหรับทั้งภารกิจตรวจจับคน (เปิดฝา) และวัดปริมาตรขยะ (ติดตามความจุ)
- เมทริกซ์คำสั่งลอจิก Arduino Uno: หัวใจหลักของระบบ Uno จะจัดการเส้นทางข้อมูลจากเซนเซอร์ไปยัง LCD ผ่าน อัลกอริทึมวัดระยะ พิเศษ มันจะประสานงานการแปลงพัลส์เสียงให้เป็นระดับการเติมขยะแบบเปอร์เซ็นต์และมุมเซอร์โว เพื่อให้ได้ ความแม่นยำของลอจิก 100%
- เครื่องยนต์แสดงผลภาพ HUD: ผ่าน การส่งข้อมูลไปยัง LCD 16x2 พิเศษ ระบบจะจัดการอัปเดต "ระดับขยะสด" และตัวบ่งชี้สถานะ LED เพื่อสร้าง แดชบอร์ดสำหรับการตรวจสอบ ที่สมบูรณ์แบบสำหรับการป้องกันในระดับโรงงานในอนาคต
โครงสร้างพื้นฐานฮาร์ดแวร์และระดับการออกแบบ
- Arduino Uno R3 (เทพพยากรณ์ขยะ): ถูกเลือกให้เป็นฮาร์ดแวร์ประสิทธิภาพสูง (ATmega328P) ทำหน้าที่เป็น สะพานเชื่อมระหว่างลอจิกและ Human-Machine Interface (HMI) ประสานงาน ลำดับการโพลข้อมูลแบบเรียลไทม์ ที่ซับซ้อนและเส้นทางส่งสัญญาณความเร็วสูง
- โหนดวัดระยะแม่นยำ HC-SR04: ถูกเลือกมาเป็นพิเศษสำหรับ ความแม่นยำในการสุ่มตัวอย่างระยะทาง โหนดหนึ่งจัดการการเปิดฝาโดยคน ส่วนโหนดที่สองวัดความสูงของขยะภายในที่แน่นอน ซึ่งจำเป็นสำหรับภารกิจด้านสุขอนามัยที่สำคัญ
- ฮับขับเคลื่อนจลนศาสตร์ SG90: เพื่อให้แน่ใจใน "ความต่อเนื่องของการเปิด-ปิดฝา" สถานีทำงานนี้มี ฮับเชื่อมโยงเซอร์โว โดยการส่งสัญญาณ PWM-Logic ผ่านไมโครเซอร์โว ระบบจะรักษา HUD ความเสถียรเชิงกล ที่สมบูรณ์แบบสำหรับการเปิด-ปิดอัตโนมัติ
- เมทริกซ์การเชื่อมต่อแบบบัดกรี: ระบบเข้าสู่ระดับความน่าเชื่อถือแบบมืออาชีพผ่าน ลอจิกอินเตอร์เฟซที่ปลอดภัย โดยการส่งสัญญาณผ่านขา LCD และตัวต้านทาน (Resistor) ด้วยการบัดกรีที่เสถียรสูง สถานีทำงานจะรักษา HUD ความเสถียรทางอิเล็กทรอนิกส์ ที่สมบูรณ์แบบ เพื่อประสบการณ์การทำงานแบบ "Zero-Error"
ขั้นตอนการทำโปรเจคนี้ มาจัดไปวัยรุ่น!
- หา Arduino Uno มาให้ได้ก่อน

- เอา LCD Display มาด้วย

- คว้า LED มาเลยวัยรุ่น
- ตามด้วย POT 10K

- ตัวต้านทาน (Resistor) 330 โอห์ม เอามา 1 ตัว
- เซ็นเซอร์อัลตราโซนิก (Ultrasonic Sensor) เอา 2 ตัว

- มอเตอร์เซอร์โว (Servo Motor) ตัวนึง
- อะแดปเตอร์ 5V กับ DC Jack

- Jack 9V สำหรับ Arduino

- จัมเปอร์ไวร์ (Jumper Wires) (อันนี้พี่ทำเองตามที่ต้องการเลยที่บ้าน)
- ลงมือบัดกรี LCD ลงบนบอร์ด PCB กัน

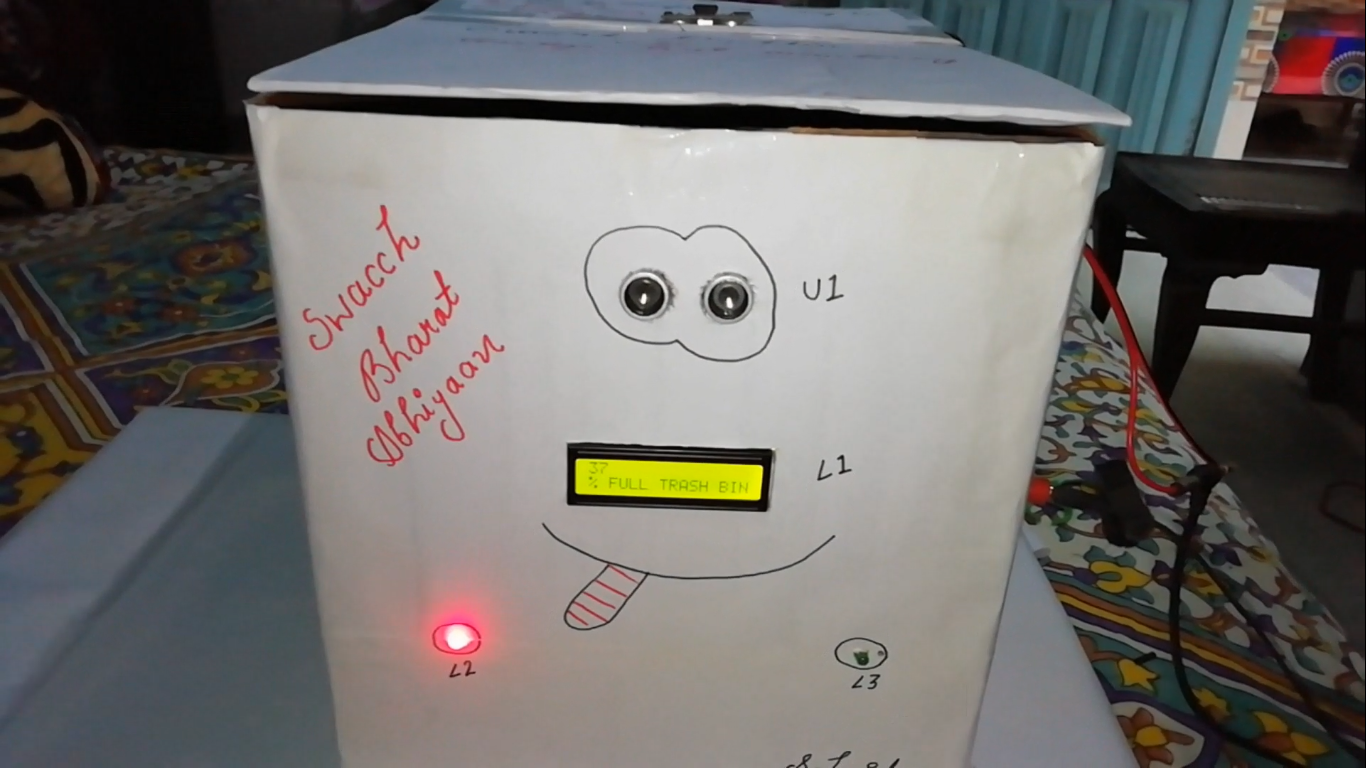
- หาถังขยะ (หรือกล่องอะไรก็ได้ที่คิดว่าเจ๋ง) มา 1 ใบ
- เจาะรูบนกล่องเพื่อติดเซ็นเซอร์อัลตราโซนิกกับ LCD

- วางของลงบนกล่องนี้แหละ

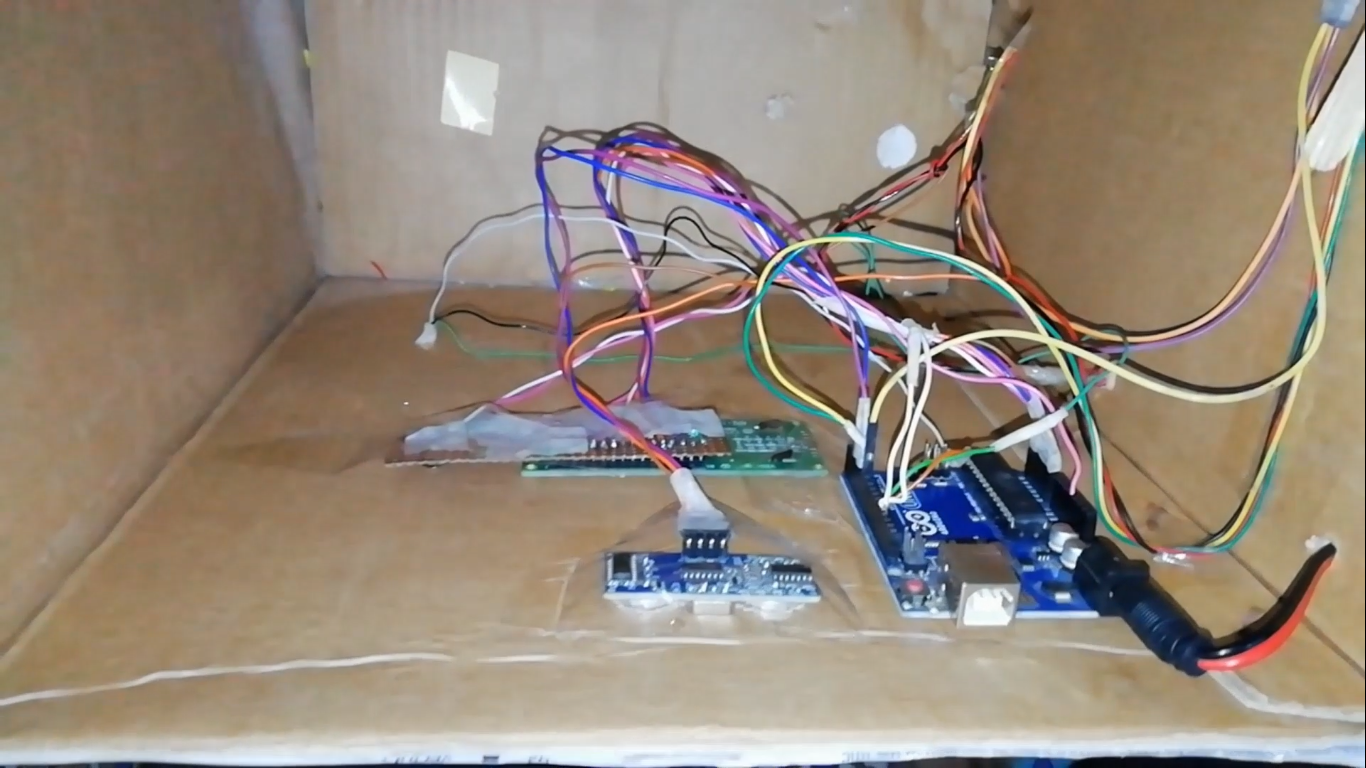
- มองเข้าไปข้างในกันหน่อย

- เอาเซ็นเซอร์อัลตราโซนิกอีกตัวมาติดบนฝากล่องครึ่งนึง
- วางมอเตอร์เซอร์โวไว้ทางซ้ายของกล่อง

วาง LED ทั้งสองตัวไว้ใต้ LCD
ต่อไม้ (หรือแกนอะไรก็ได้) เข้ากับเพลาของมอเตอร์เซอร์โว

- อีกด้านนึงพี่ต่อ DC Jack เข้าไป

- วาง Arduino ไว้ข้างในกล่อง

- ต่อ DC Jack ของ Arduino เข้าไป
- ติดฝากล่องอีกครึ่งนึงเข้าไป
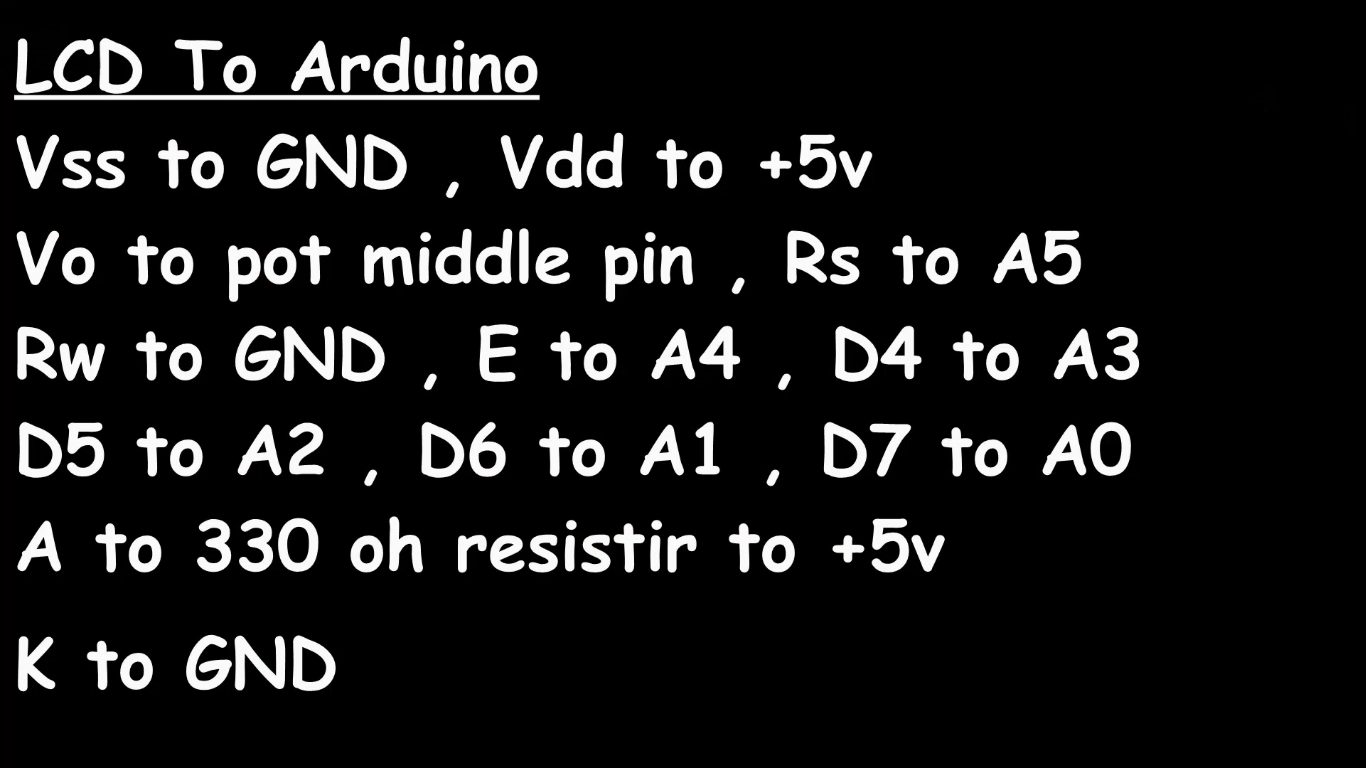
- การต่อสายจาก LCD ไปหา Arduino
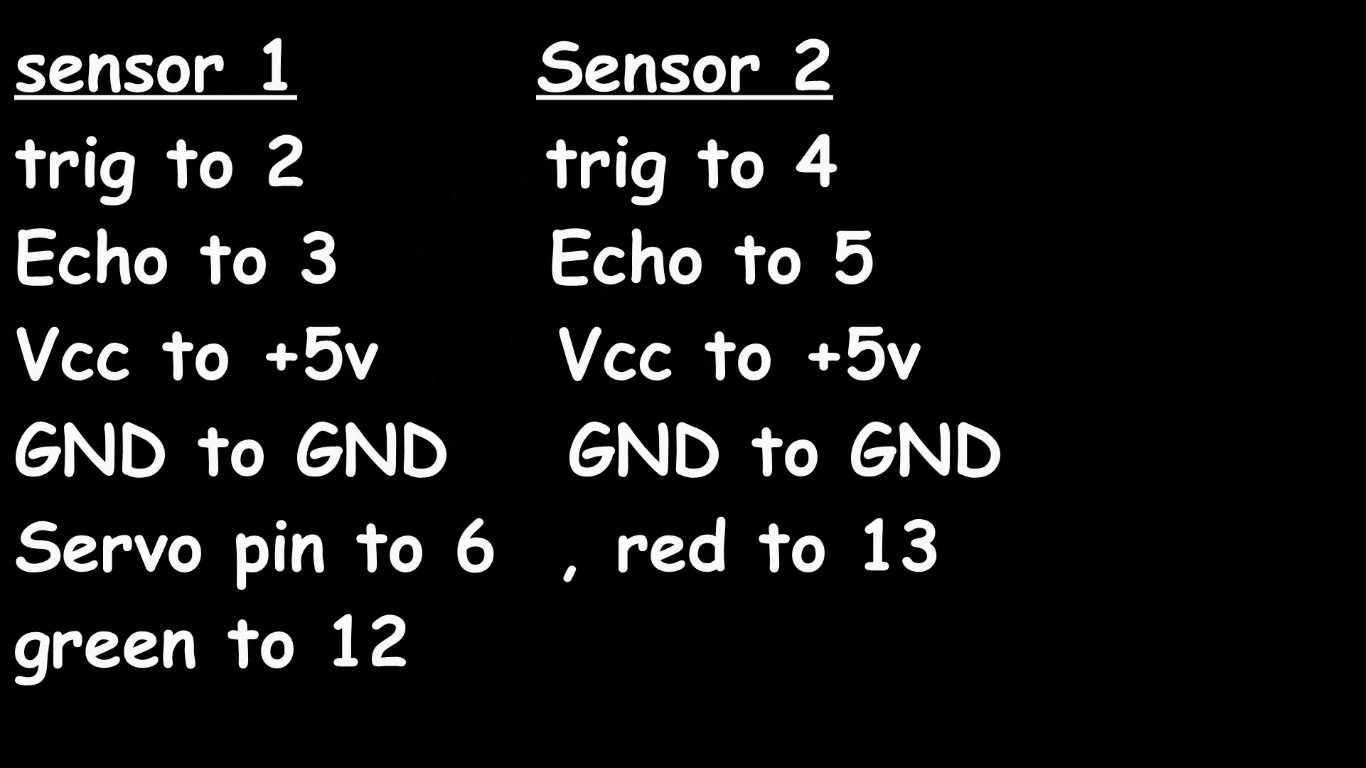
- การต่อสายจากเซ็นเซอร์
- ต่อสายเสร็จแล้วก็อัพโหลดโค้ดกัน (โค้ดเด็ดอยู่ด้านล่างนี่แหละ..อิอิ)
ตรรกะทางเทคโนโลยีและอัลกอริทึมการทำงาน
ระบบของเราบรรลุความน่าเชื่อถือระดับมืออาชีพได้ผ่าน กลยุทธ์การประสานงานเฟิร์มแวร์ หลายประการ:
- การวนซ้ำแบบประสานและเบี่ยงทิศ (Iterative Ranging-Sync Shunt): เฟิร์มแวร์ใช้ ตรรกะตามสัดส่วนระยะทาง (Proportional-Distance Logic) สัญญาณอัลตราโซนิกทำให้เกิด การประสานเวลาความลึกที่แม่นยำ (Precise Depth Synchronization) บน HUD ที่แสดงภาพและข้อมูลระยะไกล
- โหมด HUD ตรวจจับอัตโนมัติ (Autonomous-Gate HUD Mode): ระบบเข้าสู่ประสิทธิภาพระดับมืออาชีพผ่าน โหมดวิเคราะห์สถานะ (Status-Analysis Mode) โดยจัดการกับเซอร์โวภายใน HMI จะตรวจจับเหตุการณ์ "พบคน (Human-Detection)" จาก จุดเริ่มต้นการกระตุ้น (Trigger Baseline) ที่แม่นยำระดับบิต เพื่อรองรับการขยายขนาดในอนาคต
- รางหลักแสดงสถานะแบบเรียลไทม์ (Real-Time Status Master Rail): โปรเจกต์นี้ถูกออกแบบให้ "ทนทานต่อการใช้งานหนัก (Operations-Hardened)" พร้อมด้วยตรรกะการทำแผนที่แบบเปอร์เซ็นต์ ผู้ควบคุมสามารถดูสถานะ "การเติมขยะสด (Live-Fill-States)" ได้แบบเรียลไทม์ ซึ่งให้ พื้นฐานอินเทอร์เฟซระดับอุตสาหกรรม (Industrial Interface-Baseline) สำหรับภารกิจสำคัญ
- ความสามารถในการขยายตัวของฮาร์ดแวร์ (Hardware Scalability): สถาปัตยกรรมแบบโมดูลาร์นี้ผ่านการทดสอบกับถังขยะเดี่ยวแล้ว และพร้อมสำหรับ "เมืองอัจฉริยะ (Smart-City Ready)" โดยมีตัวเลือกในการเชื่อมต่อ "โหนด WiFi ESP8266" สำหรับการบันทึกข้อมูลระดับเทศบาล หรือเชื่อมต่อกับฮับ "ระบบลอจิสติกส์แบบคลาวด์ (Cloud-Fleet-Logistics)" เพื่อเพิ่มประสิทธิภาพการจัดเส้นทาง
ตรวจสอบเซนเซอร์ทั้งหมด...
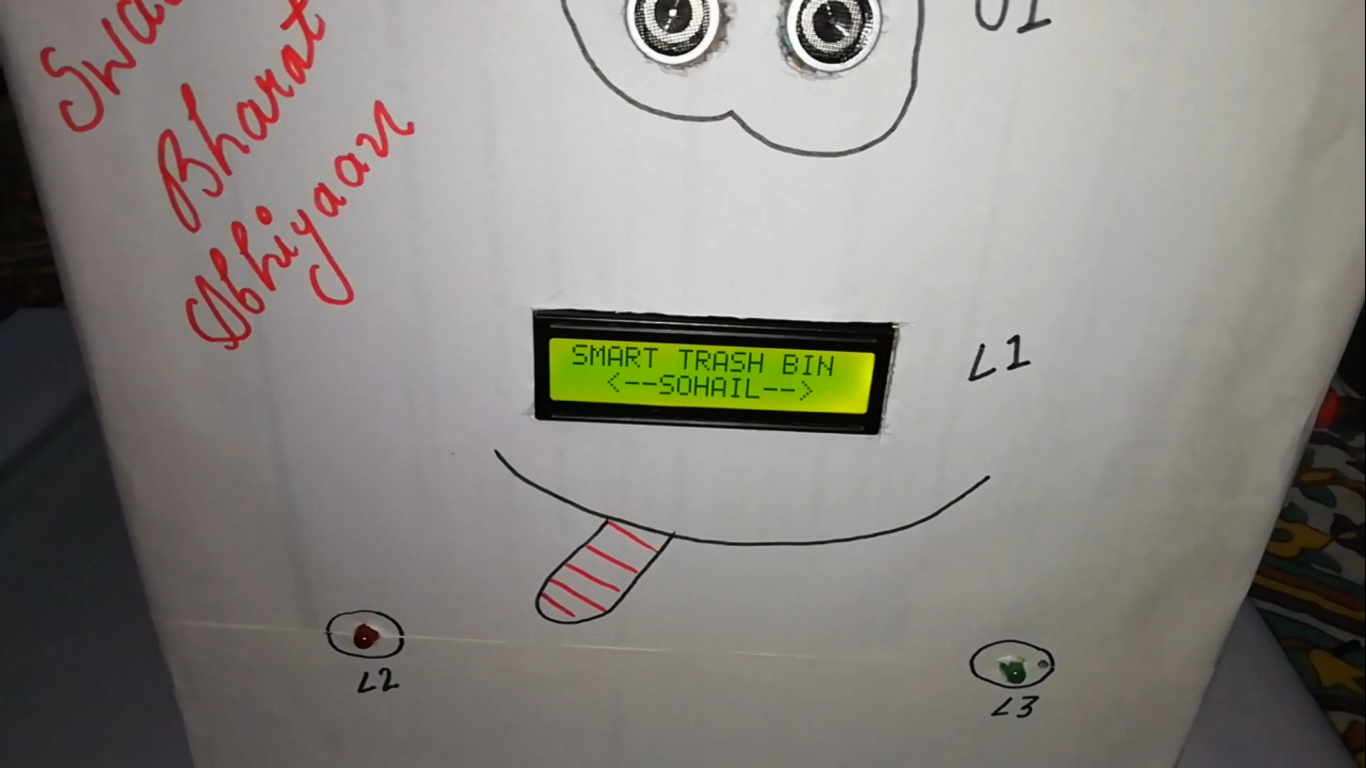
มันกำลังแสดงระดับขยะ..
หลังจากทุกอย่างเสร็จสิ้น มันจะแสดงผลแบบนี้
ทำไมโปรเจกต์นี้ถึงสำคัญ
การเข้าใจ การวัดระยะด้วยอัลตราโซนิกและการควบคุมเซอร์โว เป็นทักษะพื้นฐานที่จำเป็นสำหรับ วิศวกรระบบอัตโนมัติและสถาปนิกสมาร์ทโฮม มันสอนให้คุณออกแบบ "ทรัพย์สินที่รับรู้สภาพทางกายภาพ (Physical-Aware Asset)" ที่สามารถให้ผลตอบรับทางตรรกะที่ซับซ้อนต่อสถานะสิ่งแวดล้อม ซึ่งเป็นทักษะสำคัญสำหรับการออกแบบระบบจัดการขยะระดับอุตสาหกรรม ถังเก็บตัวอย่างทางการแพทย์ หรือ HUD สำหรับความปลอดภัยในสถานที่สำคัญ หลักการเดียวกันนี้ไม่ได้ใช้แค่กับถังขยะธรรมดา แต่ยังถูกใช้ใน HUD ตรวจสอบถังอุตสาหกรรม, สถานีตรวจสอบระยะไกลเพื่อความปลอดภัย และ จอแสดงข้อมูลการเดินทางเชิงยุทธวิธี การสร้างโปรเจกต์นี้พิสูจน์แล้วว่าคุณสามารถออกแบบระบบจัดการสุขาภิบาลระดับมืออาชีพ ที่ให้ความสำคัญกับความแม่นยำของตรรกะการวัด ความน่าเชื่อถือของการจัดการเชิงกล และการแสดงภาพสถานะแบบเรียลไทม์
ทิปทางวิศวกรรมแบบจัดเต็ม: ถ้าฝาถังขยะของคุณ "สั่นกระตุก (Chatters)" หรือ LCD "กะพริบ" แบบมั่วๆ ให้ลองตรวจสอบ การจัดการกระแสไฟของเซอร์โว (Servo-Current Shunt) บ้าง SG90 และ HC-SR04 อาจทำให้แรงดันบนราง 5V ตกได้ ถ้าอยากได้ประสบการณ์ระดับ "คุณภาพสตูดิโอ" แบบมือโปร แนะนำให้ เพิ่มตัวเก็บประจุ 100uF ข้ามขั้วไฟ และใช้ การจัดการเวลาแบบไม่บล็อก (Non-Blocking Timing) ด้วย millis() สำหรับการส่งสัญญาณเซนเซอร์ รับรองว่า HUD ถังขยะของคุณจะทำงานนิ่งเปรี๊ยะ ให้ประสบการณ์ภารกิจ "ไร้ข้อผิดพลาด (Zero-Fault)" ในทุกๆ ครั้ง
ขอบคุณ....