โปรเจกต์นี้จัดทำขึ้นเพื่อการศึกษาเน้นๆ เลยครับน้อง เอาไว้โชว์ให้น้องๆ นักเรียนได้ลองสัมผัสกับระบบติดตามแสงอาทิตย์ (Solar Tracker) และโซลาร์เซลล์แบบเบื้องต้นกัน
พูดง่ายๆ มันคือเรื่องพลังงานสะอาด โดยเฉพาะโซลาร์เซลล์เลย พี่ออกแบบระบบติดตามแสงสองแกนพร้อมแผงโซลาร์เซลล์ให้มันหมุนตามดวงอาทิตย์ไปทั้งวัน สุดเจ๋งคือระบบขับเคลื่อนมันใช้พลังงานจากแผงโซลาร์นี่แหละ ไม่ต้องไปแย่งไฟจากที่อื่นมาใช้ (Self-powered ไปเลย!)

หลักการติดตามดวงอาทิตย์ก็คือ ใช้เซ็นเซอร์วัดแสง LDR 4 ตัว แล้วให้ Arduino คอยเปรียบเทียบค่าจากเซ็นเซอร์พวกนี้ เพื่อสั่งให้มอเตอร์ DC 2 ตัว (แกนละตัว) ขับผ่านมอเตอร์ไดรเวอร์ให้แผงหันไปทางที่มีแสงสว่างที่สุด

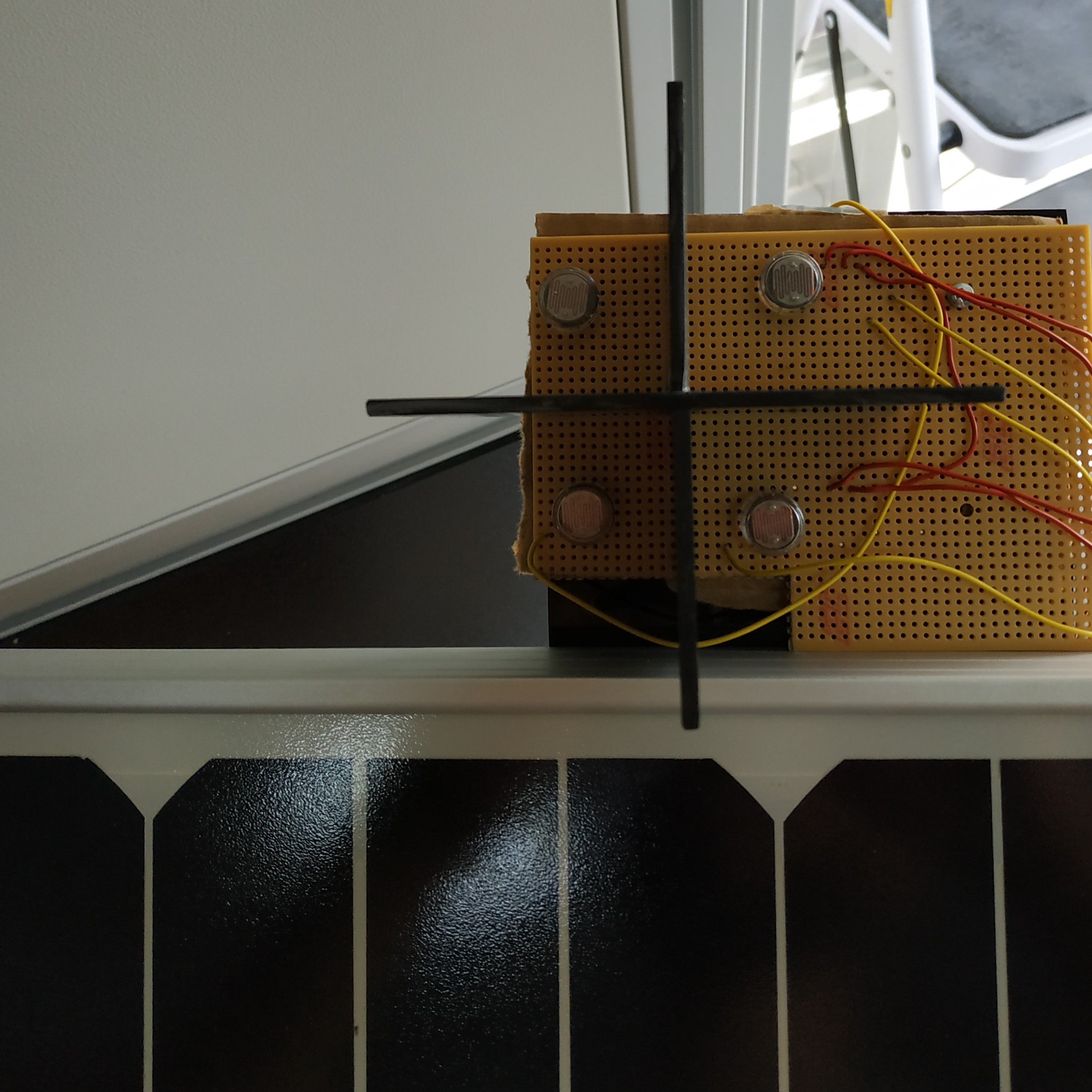 LDRs
LDRs
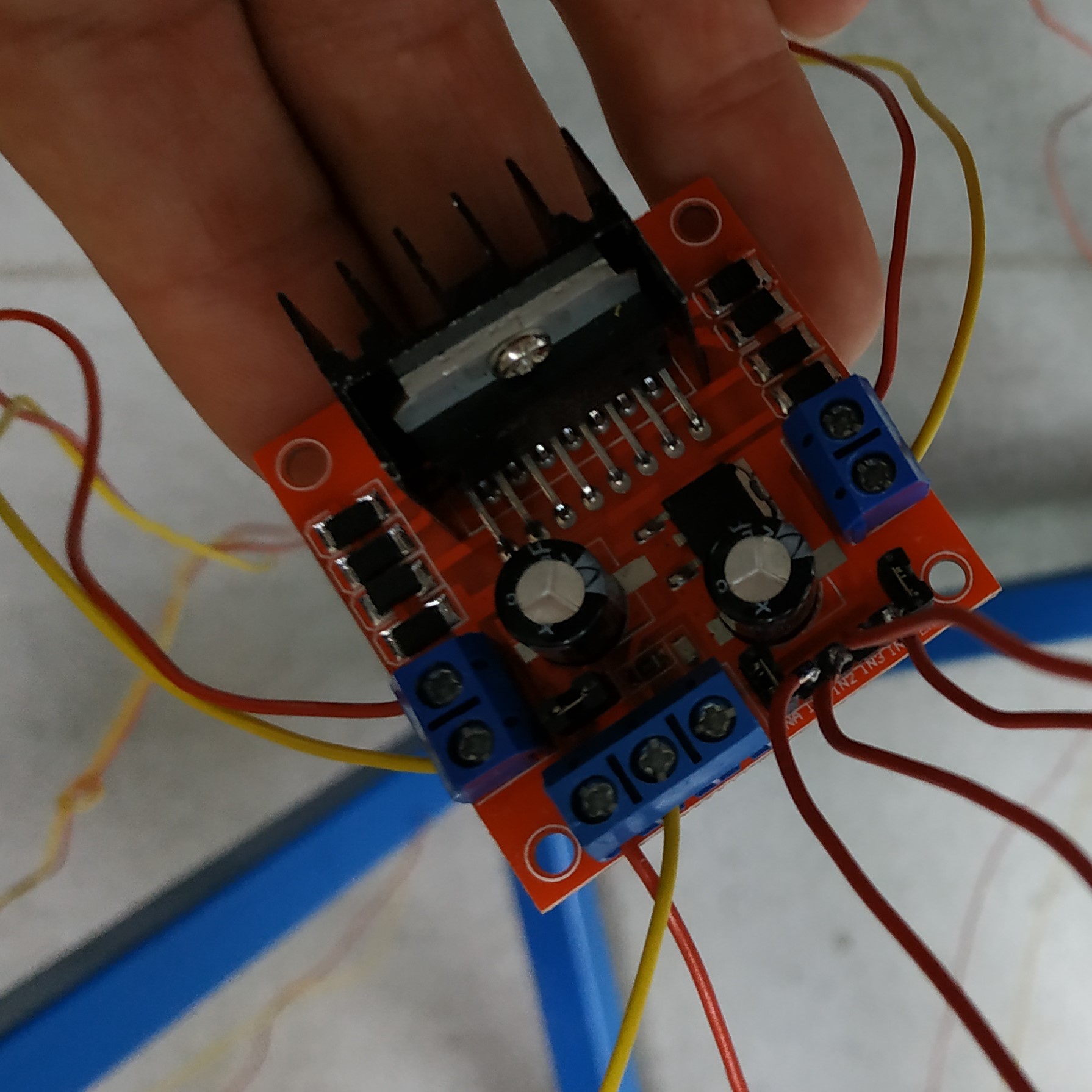 Motor Driver
Motor Driver
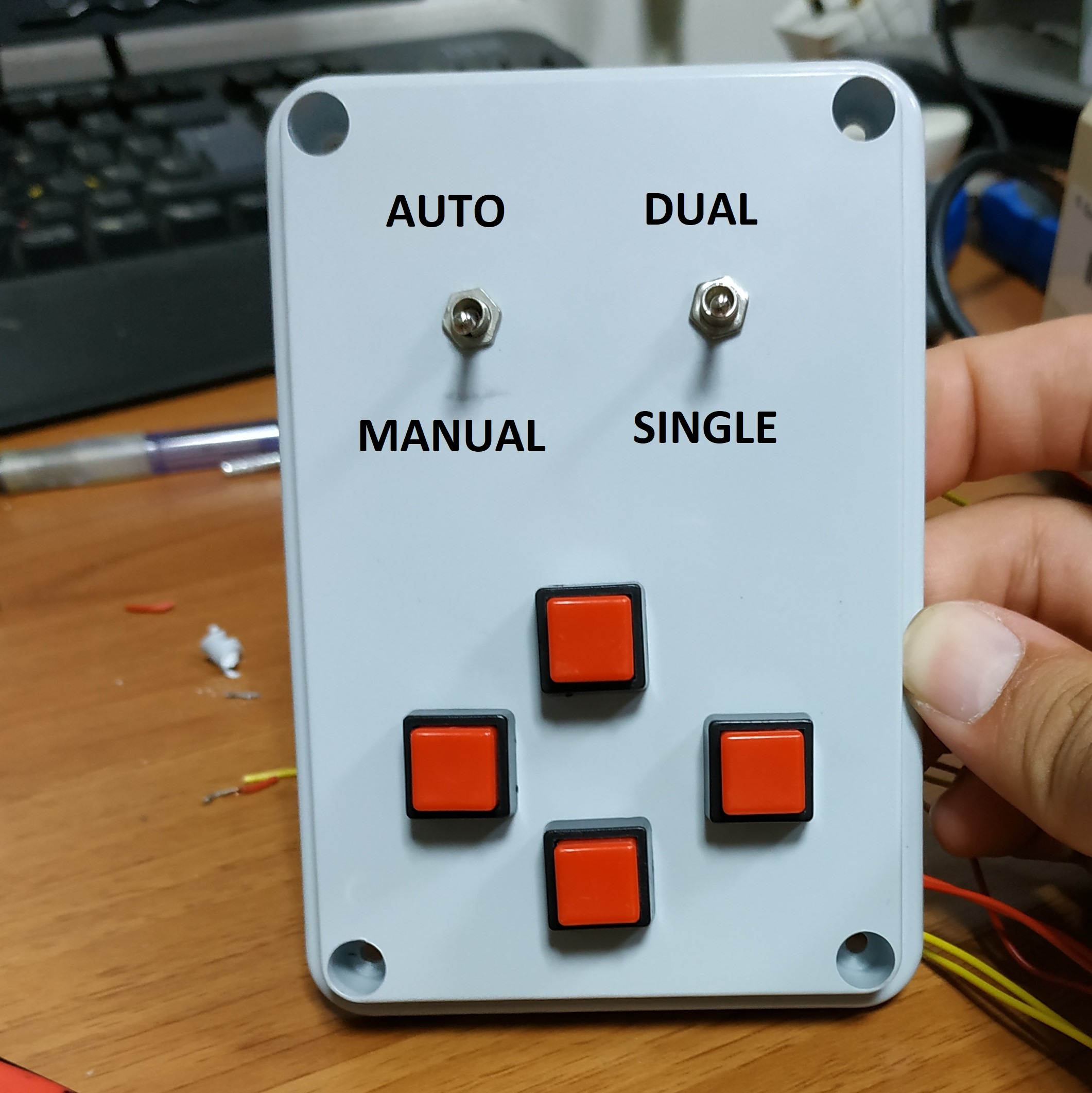
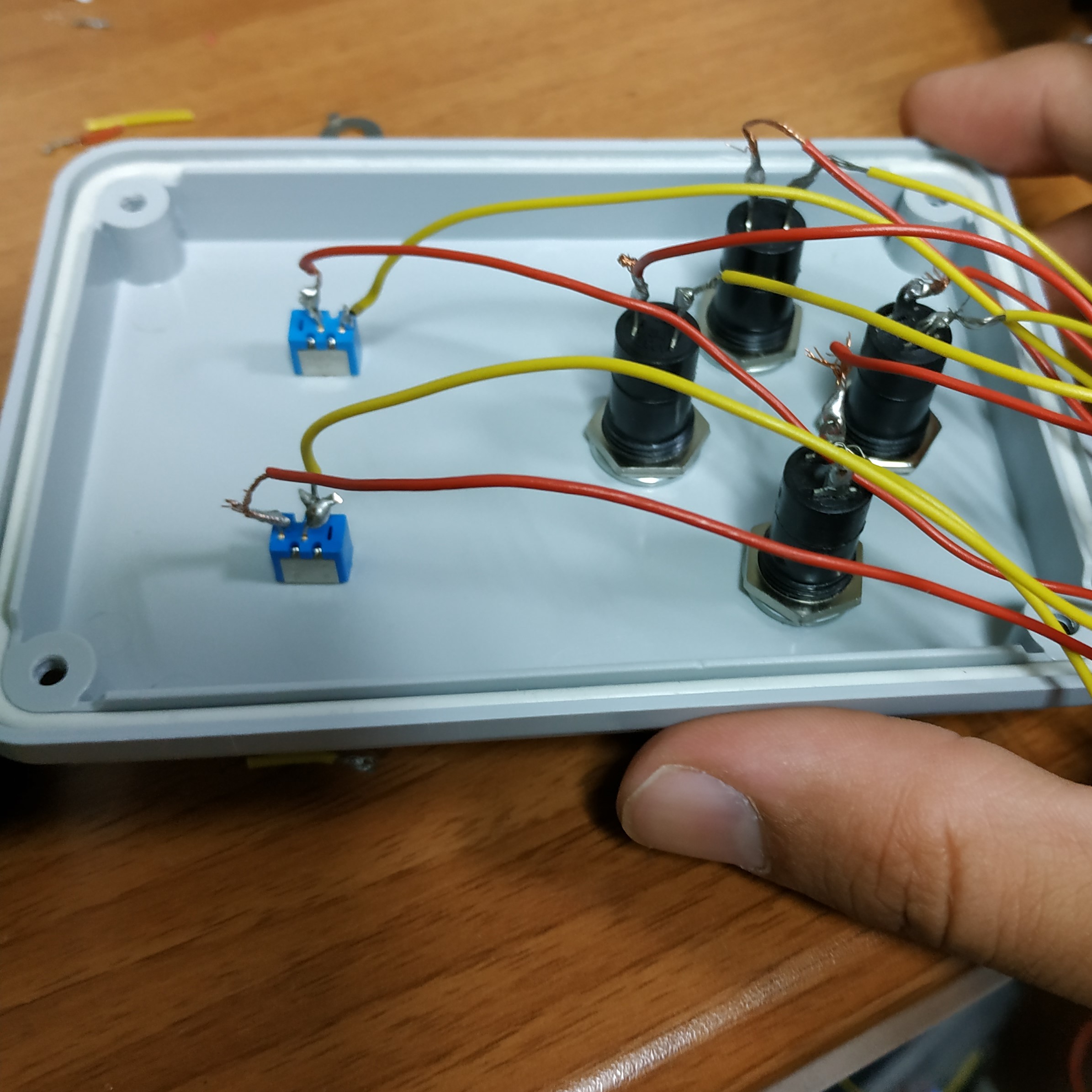
แล้วก็มีรีโมทคอนโทรลให้เล่นด้วยนะ มีสวิตช์ Auto/Manual, สวิตช์เลือก Single/Dual Axis และปุ่มกด 4 ปุ่ม
- ถ้าโยกสวิตช์แรกไปที่ Manual น้องจะสามารถบังคับหมุนแผงด้วยปุ่ม 4 ปุ่มนี่ได้เลย (หมุนซ้าย-ขวา แกนนอน และ ขึ้น-ลง แกนตั้ง)
- แต่ถ้าโยกสวิตช์แรกไปที่ Auto ระบบจะทำการติดตามแสงอัตโนมัติให้เอง จะติดตามแบบแกนเดียวหรือสองแกนก็ขึ้นอยู่กับสวิตช์ตัวที่สองนั่นแหละ

ลงลึกเรื่องเทคนิค (แบบจัดเต็ม)
การทำ Solar Tracker ขนาดใหญ่ที่ต้องรับน้ำหนักแผงกระจกหนักๆ ข้างนอกเนี่ย มีความท้าทายทางวิศวกรรมเครื่องกลอยู่ไม่น้อยเลย Solar Tracker 35W ตัวนี้ใช้ชิ้นส่วนที่แข็งแรงเพื่อเคลื่อนย้ายน้ำหนักที่มาก ซึ่งสามารถเพิ่มผลผลิตพลังงานจากแผงโซลาร์ได้มากกว่า 30% เทียบกับการติดตั้งแผงแบบตายตัว
มอเตอร์ Worm-Gear (แบบล็อกตัวเองได้)
ทำไมไม่ใช้สเต็ปเปอร์มอเตอร์ตัวใหญ่ๆ ล่ะ? เพราะแผงโซลาร์หนักๆ มันเหมือนใบเรือตอนโดนลมนะ สเต็ปเปอร์มอเตอร์ต้องใช้กระแสไฟจำนวนมากตลอดเวลาแค่เพื่อให้มันยืนอยู่ที่เดิมต้านแรงลม
- ทางออกคือใช้ มอเตอร์ DC 12V แบบ Worm-Gear (คล้ายๆ มอเตอร์ปัดน้ำฝนในรถยนต์)
- โครงสร้างเกียร์หนอน (Worm Gear) มันพิเศษตรงที่ มอเตอร์สามารถหมุนเพลาส่งออกได้ง่าย แต่แผงโซลาร์หนักๆ ไม่สามารถจะหมุนย้อนกลับมาขับมอเตอร์ได้ พอมอเตอร์หยุด แผงก็จะถูกล็อกอย่างแน่นหนา ไม่ต้องใช้ไฟฟ้าแม้แต่จูลเดียวเพื่อรักษาตำแหน่ง
เรื่องจำเป็นของลิมิตสวิตช์ (ห้ามข้าม!)
เซอร์โวมอเตอร์ตัวเล็กๆ มันมีขีดจำกัดการหมุนในตัวอยู่แล้ว แต่มอเตอร์ DC 12V ทรงพลังไม่มีนะ! ถ้าไม่มีระบบป้องกัน มันจะหมุนจนโครงสร้างพังไปเลย
- น้อง ต้องติดตั้งลิมิตสวิตช์ (Microswitches) แบบทนทาน ที่จุดสุดขีดของการหมุนทั้งแกนนอนและแกนตั้ง
- การล็อกด้วยซอฟต์แวร์:
if (analogRead(LDR_East) > LDR_West) {
if (digitalRead(Limit_East) == LOW) { // ขยับได้ปลอดภัยมั้ย?
DriveMotorEast();
} else {
StopMotor(); // ชนขีดจำกัดแล้ว หยุดด่วน!
}
}
- โค้ดนี้สร้างการล็อกทางซอฟต์แวร์แบบแข็งแรง ป้องกันไม่ให้ Arduino สั่งให้มอเตอร์เคลื่อนไหวเกินขอบเขตทางกลไกที่ปลอดภัย
ระบบสำหรับงานหนัก (แบบจัดเต็ม)
- ไมโครคอนโทรลเลอร์ (Microcontroller): ใช้ Arduino Mega หรือ Uno ไว้คิดเลขและประมวลผลเซ็นเซอร์
- เซ็นเซอร์ (Sensors): LDR (Light Dependent Resistor) 4 ตัว จัดวางแบบกากบาท เพื่อตรวจจับความเข้มแสงจากทิศหลักทั้งสี่
- มอเตอร์ไดรเวอร์ (Motor Drivers): BTS7960 43A Motor Drivers ตัวนี้ต้องมี! มันจำเป็นมากเพราะต้องรับมือกับกระแสสูงแบบฉับพลันและกระแสต่อเนื่องที่มอเตอร์เกียร์ DC งานหนักต้องการ
- แอคชูเอเตอร์ (Actuators): มอเตอร์ปัดน้ำฝนรถยนต์ 12V หรือมอเตอร์แบบ Worm-Gear ที่แรงเทียบเท่า
- แหล่งจ่ายไฟและโครงสร้าง: โซลาร์เซลล์ 35W หรือ 50W สำหรับจ่ายไฟให้ระบบทั้งหมด ติดตั้งบนโครงสร้างที่แข็งแรงอย่างเหล็กหรืออลูมิเนียม