มาวัดความเร็วรถของเล่นกันเถอะ!
พวกเราทุกวัยชอบเล่นรถของเล่นสุดเท่... เราจำเป็นต้องรู้ว่ามันวิ่งเร็วแค่ไหน!
เห็นลูกชายวัย 8 ขวบเล่นรถ Hot Wheels แล้วกรี๊ดดังลั่นว่า "รถคันนี้เร็วที่สุดในโลก! 300 กม./ชม.!" ผมเลยสงสัยว่าจะทำเครื่องมือวัดความเร็วจริงๆ ของเจ้าหมากระป๋องพวกนี้ได้ไหม แล้วพอค้นเน็ตดูก็เจอเจ้าเครื่องประหลาดที่เรียกว่า "Arduino" นี่แหละ
ผมเป็นคนไม่รู้เรื่องอิเล็กทรอนิกส์หรือคอมพิวเตอร์เลยสักนิด แต่เชื่อไหมว่ามันเริ่มต้นง่ายและถูกมาก ผมทำได้ทีละขั้น อ่าน ศึกษา ลองทำ คิดตาม งั้นมาแบ่งปันให้ทุกคนกันดีกว่า!
แนวคิดง่ายๆ: วัดระยะทางที่กำหนด แล้วจับเวลาที่รถวิ่งผ่านเซ็นเซอร์สองจุด จากข้อมูลนี้ คิดเลขง่ายๆ ก็จะได้ความเร็วจริงมาแสดงบนหน้าจอ LCD ให้คนดูตื่นเต้นกัน!
ยังไม่พอ! ลูกชายผม (ไม่รู้ทำไม...) ชอบเลโก้! ผมเลยจะสร้าง "หอควบคุม" ติดตั้งจอ LCD เหมือน "วิดีโอวอลล์" ใหญ่ให้คนดูแข่งรถ พร้อมห้องควบคุมที่มีเลโก้มิฟฟิกัวร์เป็นพนักงานควบคุมการแข่งขัน
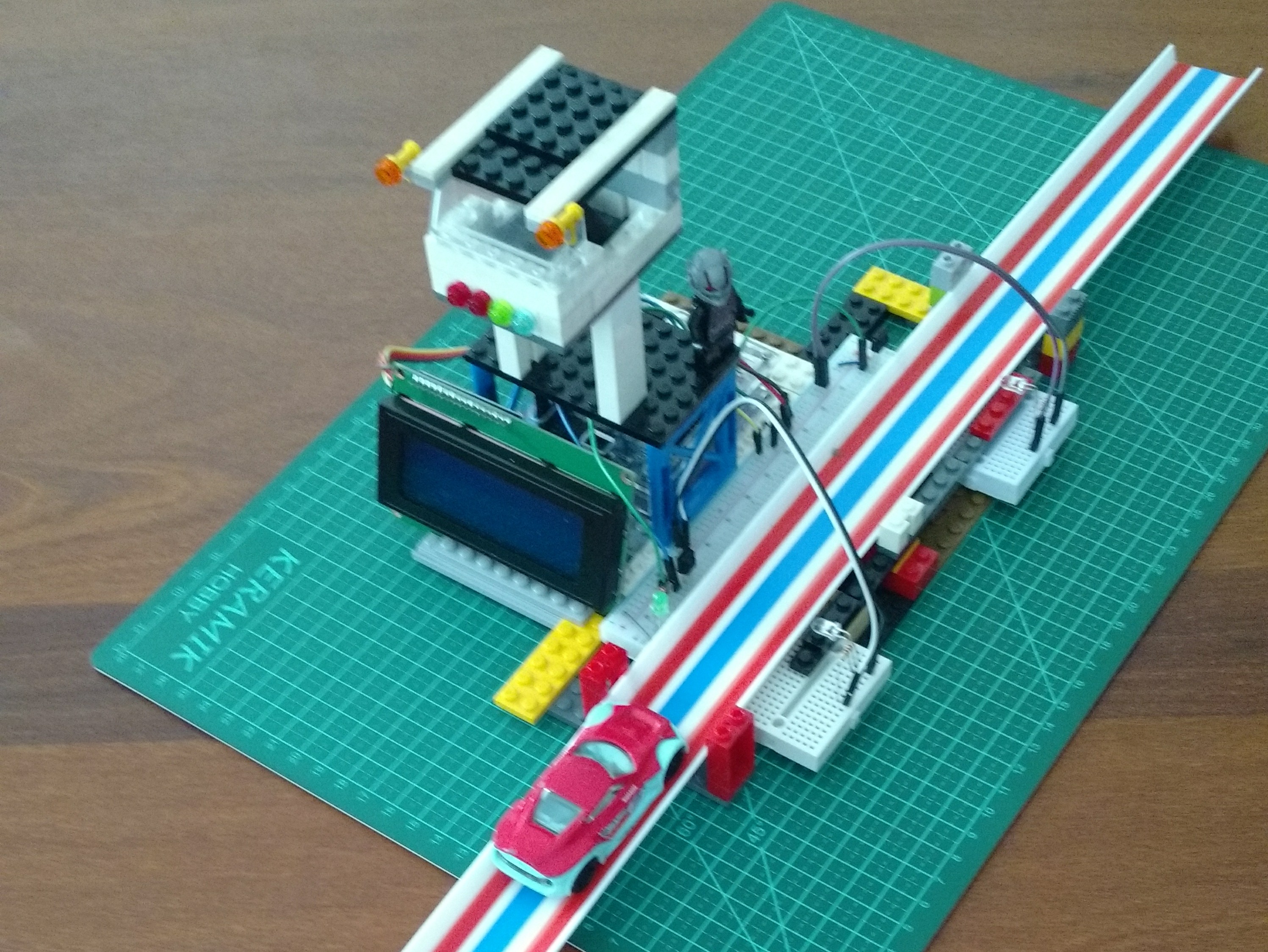
โปรเจกต์ที่ประกอบเสร็จแล้วกับเลโก้
ล้วงลึกเทคนิคแบบจัดเต็ม
โปรเจกต์ "Velocity-Hub" นี้เป็นการใช้งานจริงของ การวัดเวลาด้วยประตูแสง (Optical-Gate Chronometry) และ การสุ่มตัวอย่างเวลาความถี่สูง (High-Frequency Temporal Sampling) ออกแบบมาเพื่อวัดความเร็วรถของเล่นแบบแม่พิมพ์ (Hot Wheels™) ด้วยความแม่นยำ โดยใช้เซ็นเซอร์ตัดลำแสงอินฟราเรดคู่หนึ่งตรวจจับการเข้าและออกของยานพาหนะผ่านระยะทางที่กำหนดไว้ ด้วยการจับช่วงเวลาระหว่างสองเหตุการณ์นี้ด้วยความละเอียดระดับไมโครวินาที $(\Delta t)$ ระบบจะคำนวณความเร็วสัมบูรณ์ได้อย่างแม่นยำสูง
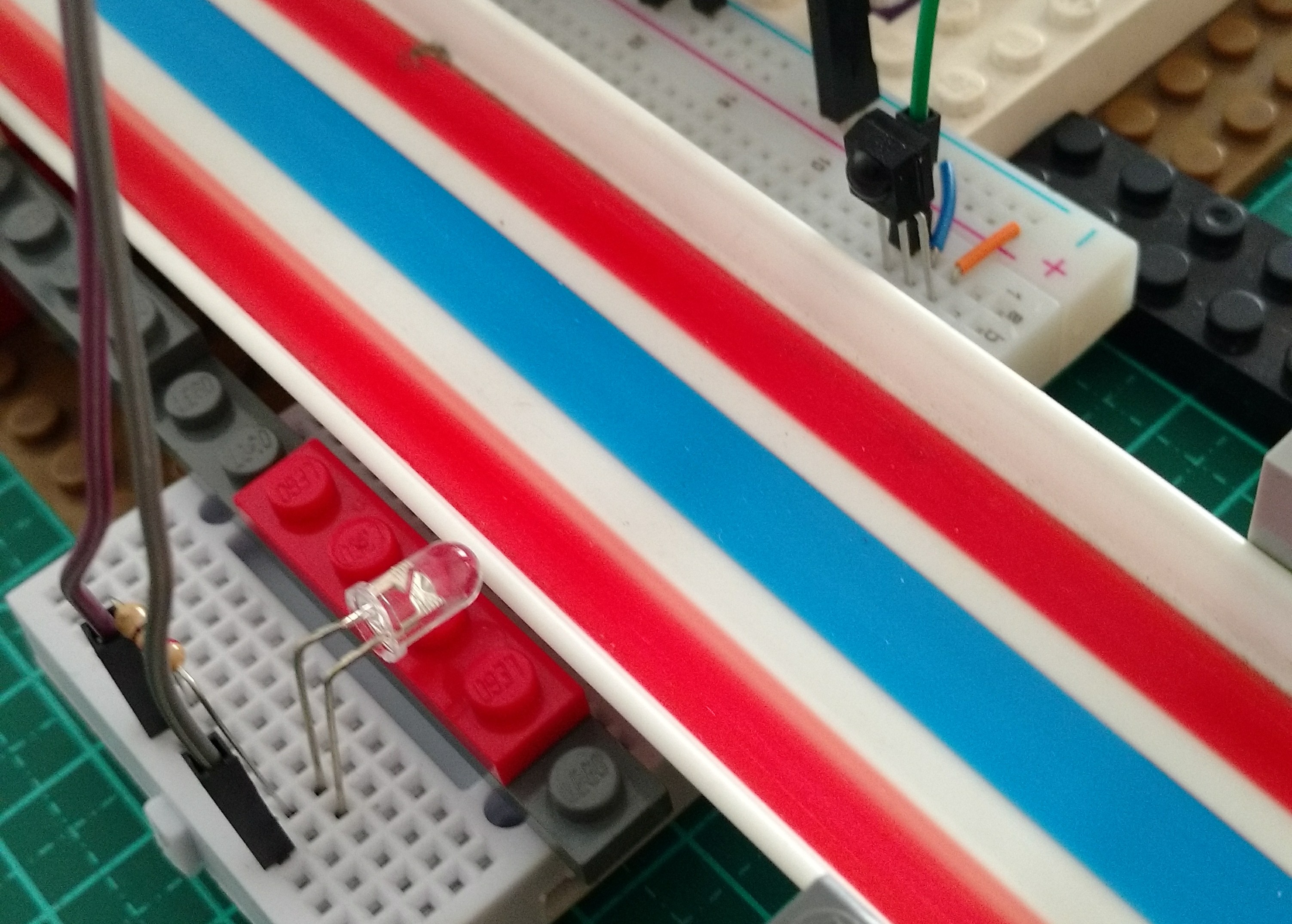
การตัดลำแสงอินฟราเรดและการวิเคราะห์ความสมบูรณ์ของสัญญาณ:
- ฮาร์มอนิกส์ของความถี่พาหะ 38kHz: เซ็นเซอร์ IR ทำงานที่ความยาวคลื่นโฟตอนเฉพาะ $(\approx 940\text{nm})$ การวิเคราะห์ต้องจัดตำแหน่งคู่ตัวส่งและตัวรับให้แม่นยำ (ตามรูปด้านบน) เพื่อเพิ่มอัตราส่วนสัญญาณต่อสัญญาณรบกวน $(SNR)$ ให้สูงสุด การวินิจฉัยเน้นที่ "เวลาสวิตช์" ของตัวรับ IR รถความเร็วสูงต้องการเซ็นเซอร์ที่มีเวลาขึ้น/ลงต่ำ $(\mu\text{s})$ เพื่อป้องกันการบิดเบือนของพัลส์ที่อาจทำให้เกิดฮาร์มอนิกส์ความคลาดเคลื่อนของเวลา
- การลดสัญญาณรบกวนจากแสงแวดล้อม: เพื่อป้องกันการรบกวนจากแสงฟลูออเรสเซนต์หรือแสงแดด เซ็นเซอร์มักถูกป้องกันหรือปรับสัญญาณ การวิเคราะห์ต้องตรวจสอบความแข็งของลอจิกที่ขาเซ็นเซอร์ ให้แน่ใจว่าการเปลี่ยนจากลอจิก-สูง (ลำแสงไม่ขาด) เป็นลอจิก-ต่ำ (รถผ่าน) เป็นแบบทันทีและปราศจากสัญญาณรบกวนปรสิต
การสุ่มตัวอย่างเวลาและการจัดการความเร็ว:
- การวิเคราะห์ความละเอียดนาฬิกา micros(): การจับเวลาแบบ
millis()ปกติไม่เพียงพอสำหรับรางวิ่งที่สั้นกว่า 1 เมตร การวิเคราะห์ใช้ฟังก์ชันmicros()ของ Arduino เพื่อให้ความละเอียด $4\mu\text{s}$ การวินิจฉัยใช้สูตร $V = D / (t_2 - t_1)$ โดยที่ $D$ คือระยะห่างคงที่ระหว่างเซ็นเซอร์
- การวิเคราะห์ความละเอียดนาฬิกา micros(): การจับเวลาแบบ
Scale-Speed Interpolation Heuristics: นอกเหนือจากความเร็วจริง $(\text{cm/s})$ แล้ว ระบบยังสามารถคำนวณ "Scale Speed" (ความเร็วตามสเกลโมเดล เช่น สเกล $1:64$) ได้อีกด้วย ไอเดียการวินิจฉัยแบบนี้คือการเอาเลขความเร็วจริงมาคูณด้วยสเกลของรถยนต์โมเดล จะได้ค่าความเร็วแบบ "300 km/h" อลังการงานสร้างสำหรับรถแข่งเมคคาทรอนิกส์ตัวจิ๋วพวกนี้แหละ
Engineering & Implementation
การสร้างสรรค์ชิ้นนี้เน้นหนักไปที่ การสืบสวนสอบสวนเรื่องความสมบูรณ์ของสัญญาณ (Signal-Integrity Forensics) ที่อินเตอร์เฟซ IR, การจัดการบัส I2C สำหรับแสดงผลข้อมูลระยะไกลแบบหน่วงต่ำสุด (low-latency telemetry) และการบูรณาการทางเมคคาทรอนิกส์ของโครงสร้างที่ใช้เลโก้เพื่อความสวยงาม
- I2C-Bus & Display Orchestration:
- 20x4 LCD Multiplexing Forensics: ระบบใช้ I2C backpack แบบ PCF8574 กับจอ 20x4 การสืบสวนเน้นไปที่การตั้งค่าสัญญาณนาฬิกา I2C แบบ Fast-Mode $400\text{kHz}$ เพื่อให้มั่นใจว่าการอัพเดทค่า "Speed Result" จะไม่ทำให้การจับเวลาครั้งต่อไปต้องล่าช้า
- Non-Blocking Logic Heuristics: เฟิร์มแวร์ถูกออกแบบมาเป็น state-machine การสืบสวนทำให้แน่ใจว่าในขณะที่ระบบกำลังรอให้รถผ่านประตูแรก โปรเซสเซอร์จะไม่ถูก "บล็อก" (blocked) ทำให้สามารถแสดงสถานะผ่าน LED ได้แบบเรียลไทม์ $(\text{Green = Ready})$
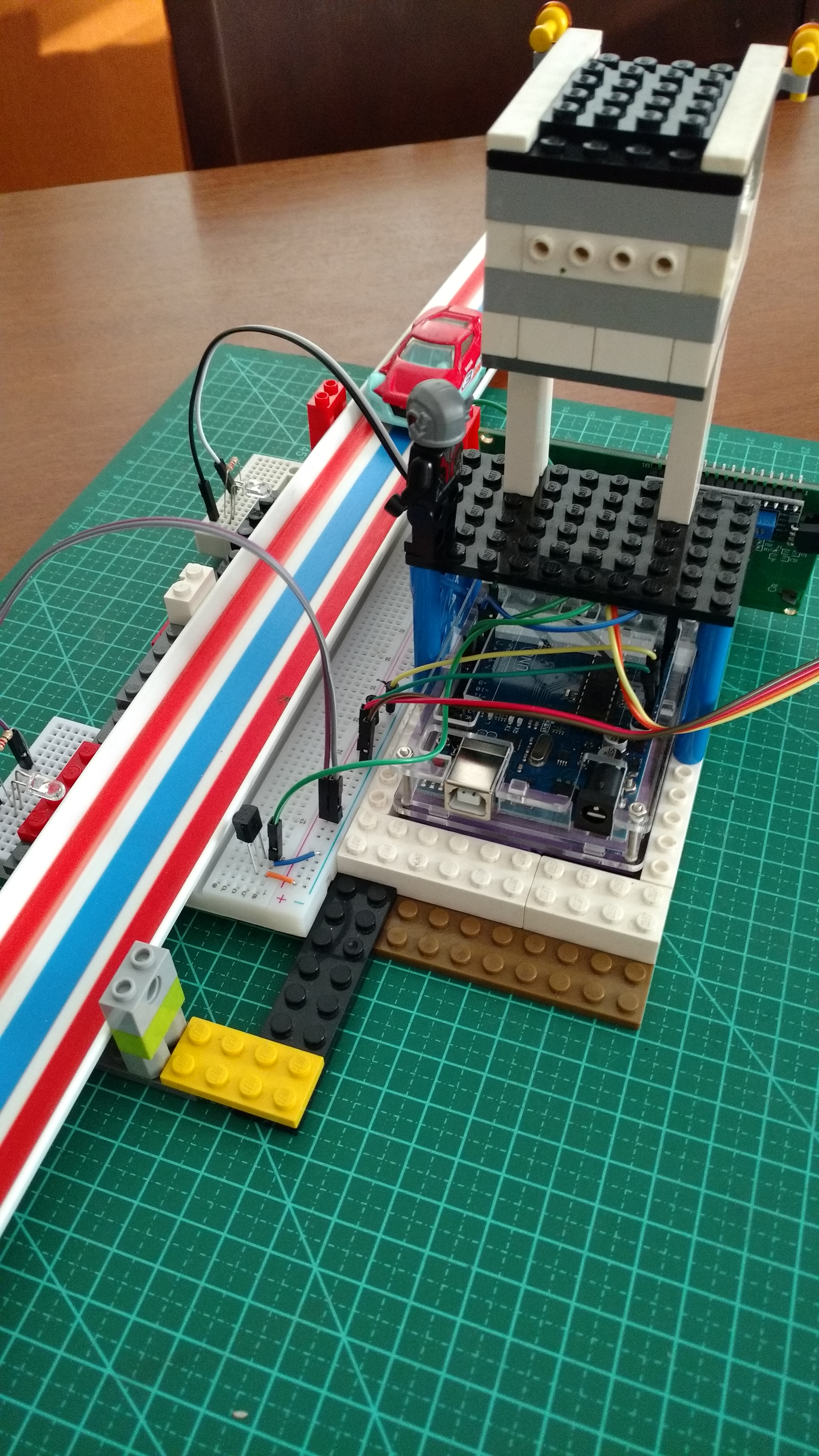
- Structural Mechatronics & LEGO Aesthetics:
- โครงสร้างหลักถูกบูรณาการเข้าไปในสภาพแวดล้อมเลโก้ "Control Tower" ตามที่เห็นในรูปประกอบ การสืบสวนโฟกัสไปที่การยึดเซนเซอร์ IR เข้ากับผนังข้างรางแข่งอย่างแข็งแรง เพื่อป้องกันไม่ให้การสั่นสะเทือนทำให้สัญญาณกระตุก (signal jitter) เวลารถ die-cast หนักๆ พุ่งผ่านด้วยความเร็วสูงสุด
โปรเจคนี้ทำงานได้โอเคบนโต๊ะทดลองเวลาที่เราโยนรถอย่างนุ่มนวล
แต่ใน "โลกแห่งความจริง" ของราง Hot Wheels เซนเซอร์พวกนี้มันอ่านค่าได้ไม่เร็วพอหรอกน้อง ใครมีโค้ดหรือวิธีอ่านเซนเซอร์ที่แม่นยำและเร็วกว่านี้ อย่าเก็บไว้คนเดียวนะ แชร์มาด้วยกันหน่อย!
Conclusion
Velocity-Hub นี่คือสุดยอดแห่ง Direct-Current Kinetic Telemetry เลยนะเว้ย ด้วยการเชี่ยวชาญใน Infrared Gating Forensics และ High-Resolution Temporal Sampling โปรเจคนี้ได้ส่งมอบเครื่องมือติดตามความเร็วระดับมืออาชีพที่แข็งแกร่ง ให้ความชัดเจนของค่าความเร็วแบบเต็มๆ ผ่านการวินิจฉัยด้วยอุปสรรคทางแสง (optical-barrier) แบบสุดล้ำ
Kinetic Precision: Mastering speed-telemetry through IR beam-break forensics.
Project creator Fabio Coelho - Rio de Janeiro - Brazil Dec 2018.