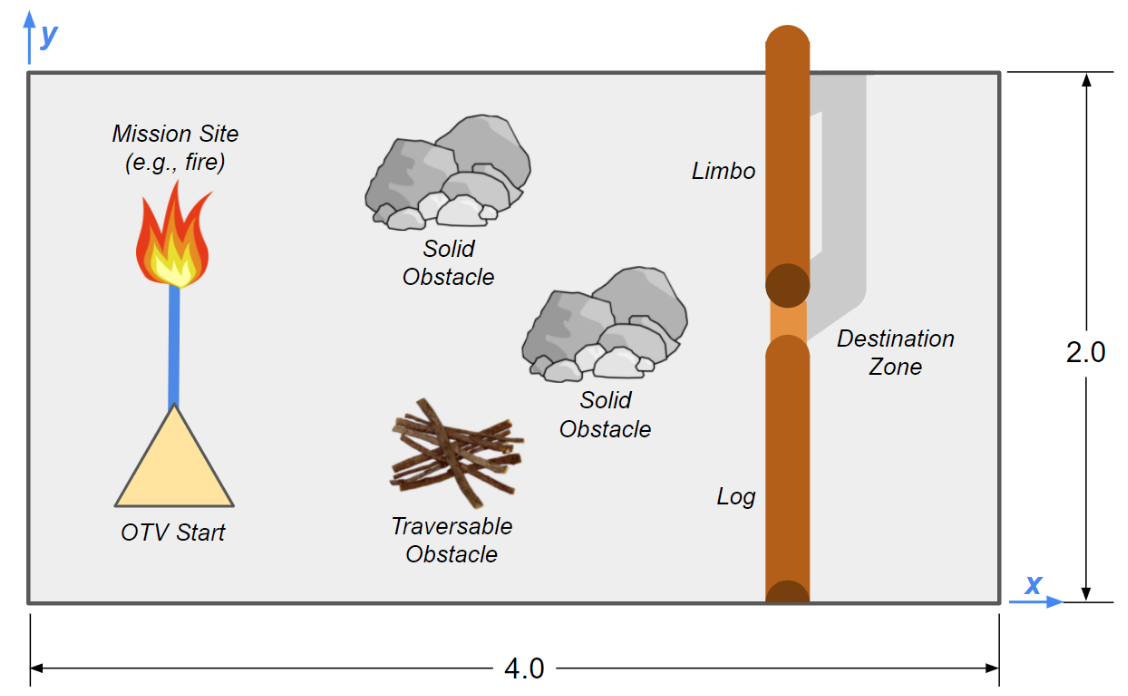
- เดินทางไปให้ถึงขอบสระน้ำในระยะ 150 มม. วัดและส่งข้อมูลกลับมาว่าน้ำในสระเป็นน้ำจืด น้ำเค็ม น้ำจืดที่ปนเปื้อน หรือน้ำเค็มที่ปนเปื้อน
- วัดและส่งค่าความลึกของน้ำในสระ โดยคลาดเคลื่อนได้ไม่เกิน 4 มม.
- เก็บตัวอย่างน้ำจากสระอย่างน้อย 20 มล.
- เดินทางผ่านสิ่งกีดขวางทั้งสามชิ้นให้หมด
- เดินทางเข้าไปยังโซนเป้าหมายให้สมบูรณ์ (เส้นทาง: ลอดใต้ราว Limbo)
นอกจากภารกิจแล้วก็มีข้อจำกัดบางประการสำหรับการออกแบบของเราด้วยนะ:
- มวลของ OTV ต้องอยู่ระหว่าง 0-3 กิโลกรัม
- ต้องทำภารกิจให้เสร็จภายใน 5 นาที
- OTV จะถูกวางในตำแหน่งและทิศทางแบบสุ่มเมื่อเริ่มต้น
- ความเค็มของน้ำ คุณภาพน้ำ และระดับน้ำจะถูกกำหนดแบบสุ่ม
- ต้องเก็บตัวอย่างน้ำจากสระที่สูง 71 มม.
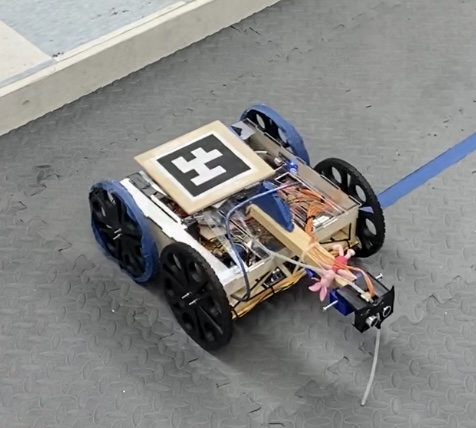
การออกแบบของเรา
เริ่มแรกเราจัดการทำระบบโครงรถ (Chassis) กันก่อน ด้านหน้า ด้านข้าง และแผ่นก้นทำจากไม้อัดที่ตัดด้วยเลเซอร์ ส่วนฝาบนตัดจากอะคริลิก โครงมีลักษณะเป็นสี่เหลี่ยม (แบบกล่อง) ขนาดประมาณ 250mm x 300mm สิ่งที่เราคำนึงถึงในการออกแบบคือการทำให้จุดศูนย์ถ่วงต่ำ และออกแบบให้แข็งแรงทนทาน
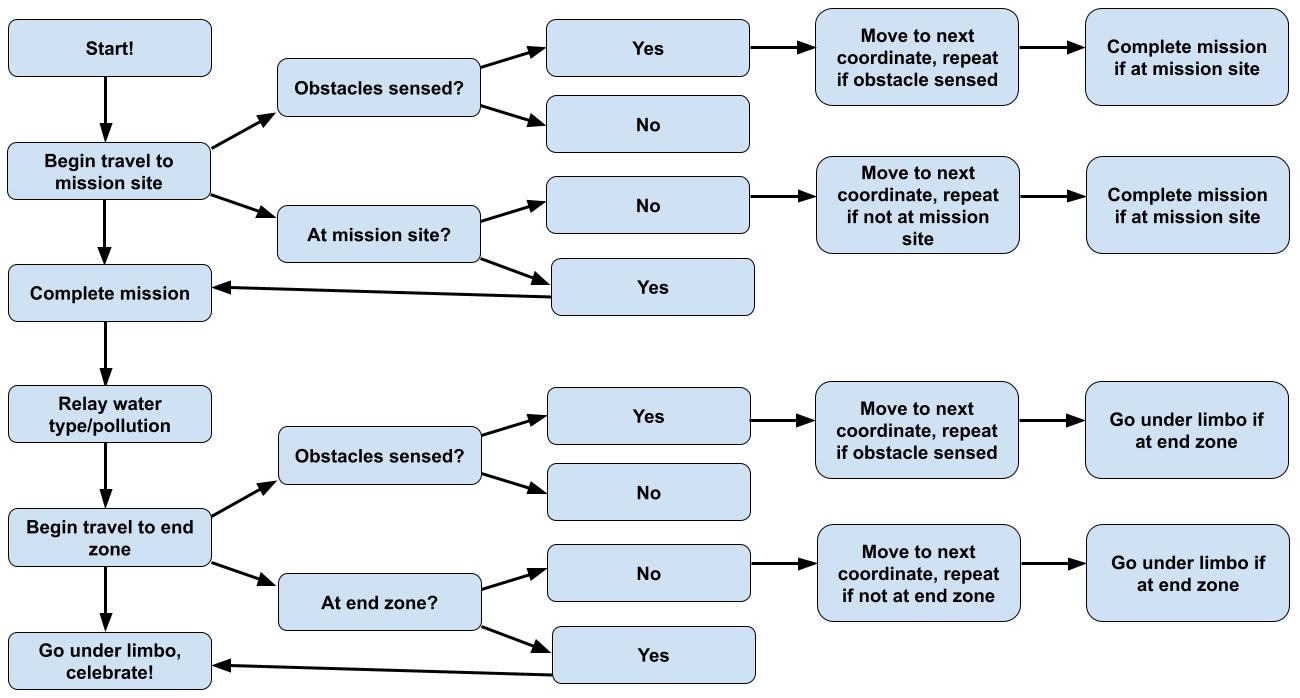
การทำให้ภารกิจสำเร็จ
เพื่อให้บรรลุเป้าหมายเฉพาะของภารกิจ เราจึงสร้างแขนกลติดไว้ที่กลางโครงรถ
- วัดระดับน้ำ: เราใช้ Ultrasonic Sensor เพราะมันใช้คลื่นเสียงวัดระยะ และจะให้ค่าที่ชัดเจนตามโค้ดของเรา เราตั้งโค้ดให้ Ultrasonic Sensor แปลงเวลาที่คลื่นเสียงสะท้อนจากวัตถุ (ในที่นี้คือผิวน้ำ) ไปเป็นระยะทาง โดยคูณด้วยความเร็วเสียงแล้วหารสอง หลังจากนั้นเราให้ Arduino แสดงผลระยะทางเป็นเซนติเมตร เพื่อทดสอบว่าค่าที่ได้จะเปลี่ยนไปตามระดับน้ำหรือไม่ หลังจากติดตั้งแขนให้อยู่ในระดับเดียวกับความสูงของโครงรถเหนือถังน้ำ เราเปลี่ยนระดับน้ำหลายครั้ง และค่าจาก Ultrasonic Sensor ก็แม่นยำ (เปลี่ยนไปตามระดับน้ำ) แสดงว่าเซนเซอร์ตัวนี้ใช้การได้แน่นอนสำหรับภารกิจส่วนแรก หลังจากตัดสินใจว่านี่คือวิธีที่ดีแล้ว เราก็พิมพ์ที่ยึดใหม่สำหรับปลายแขนด้วยเครื่องพิมพ์ 3D เพื่อเป็นบ้านให้ Ultrasonic Sensor ตัวที่สอง
- วัดมลพิษในน้ำ: เราติดตั้ง Water Pump เชื่อมกับถังเก็บน้ำที่พิมพ์ด้วย 3D ปลายท่อด้านหนึ่งจุ่มในถังเก็บ อีกปลายวิ่งไปตามแขนและห้อยลงมาจากปลายแขน พอวัดความสูงด้วย Ultrasonic Sensor เสร็จ Relay แบบ Single Channel จะถูกสั่งให้เปิด Water Pump น้ำในสระที่สัมผัสกับปลายท่อจะถูกดูดผ่านท่อเข้าไปในถังเก็บ จากนั้นเราสร้างวงจรที่มี Photoresistor กับ LED สำหรับวัดมลพิษ โดยให้แสงจาก LED ส่องผ่านท่อที่ดูดน้ำมา Photoresistor จะวัดความเข้มของแสง ถ้าน้ำปนเปื้อน ความเข้มแสงที่ผ่านมาก็จะน้อยลง
- วัดความเค็มของน้ำ: เราใช้ TDS Sensor เซนเซอร์นี้บอกว่ามีของแข็งละลายอยู่ในน้ำกี่มิลลิกรัม ค่า TDS สูงหมายถึงน้ำเค็ม ค่าต่ำหมายถึงน้ำจืด เราใส่ TDS Sensor ลงในถังเก็บน้ำ และจะทดสอบน้ำเมื่อถูกปั๊มดูดเข้ามา
Propulsion (ระบบขับเคลื่อน)
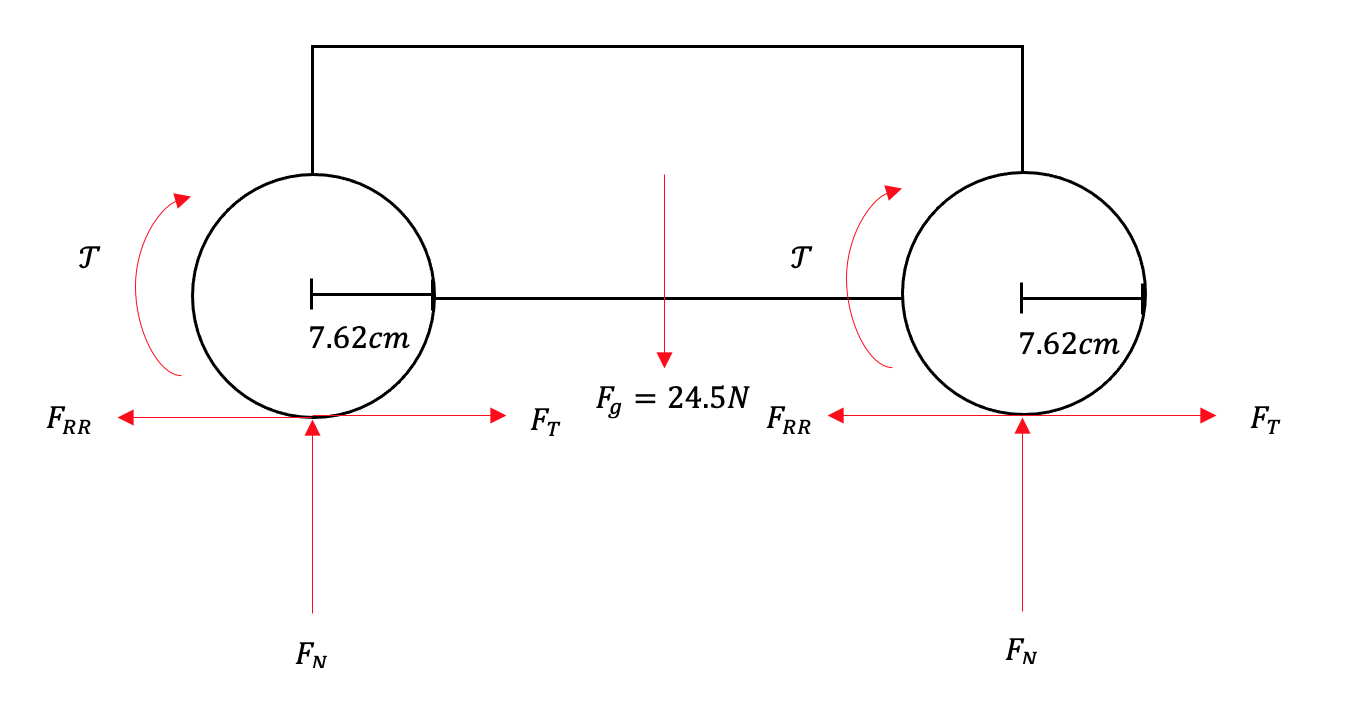
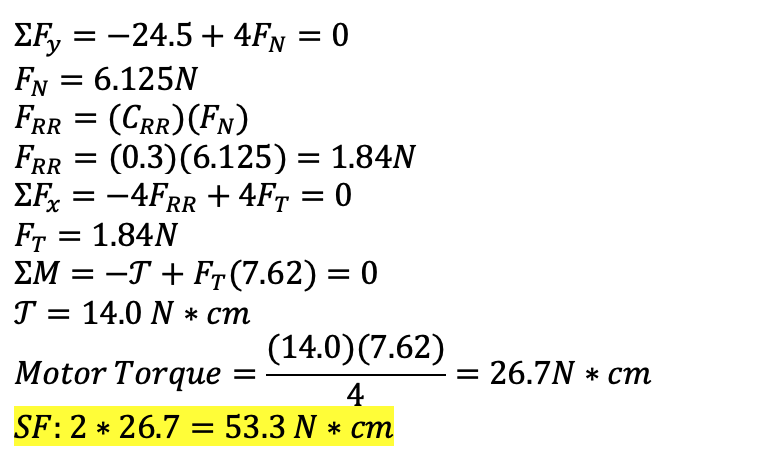
เราสร้างระบบขับเคลื่อนสี่ล้อ (4 Wheel Drive) โดยใช้:
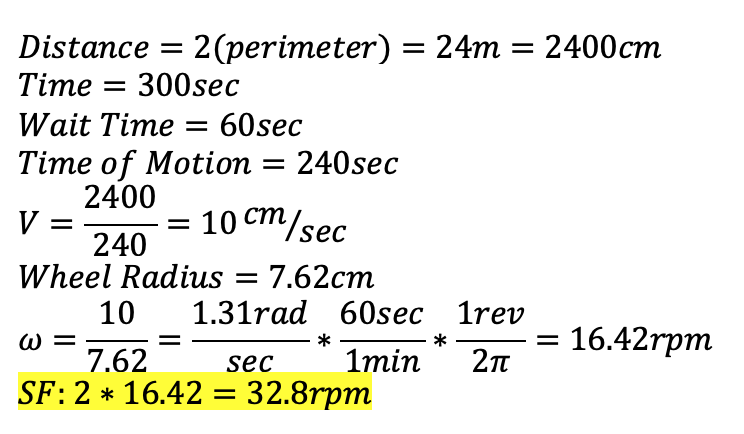
- มอเตอร์ DC 6-12V จำนวน 4 ตัว มีแรงบิด (Torque) 66 N-cm ที่แรงดัน 7.2 โวลต์
แบตเตอรี่ที่เราเลือกใช้คือ POVWAY NiMH Battery
- วัสดุ: นิกเกิลเมทัลไฮไดรด์
- แรงดัน: 7.2V
- เซลล์: 6-Cell
- ความจุ: 3600mAH
- ขั้วต่อ: Tamiya Connector
- ขนาด (LWH): 137 x 47 x24mm
- น้ำหนักแบตเตอรี่: 371 กรัม
เราตัดสินใจใช้ล้อ 4 ล้อที่พิมพ์ด้วย 3D ขนาดเส้นผ่านศูนย์กลางประมาณ 152.4 มม. และหนา 19 มม. แต่ละล้อหนักประมาณ 90 กรัม
Navigation (ระบบนำทาง)
สำหรับการนำทาง เราใช้ Ultrasonic Sensor ติดไว้ที่ด้านบนของแขนกล มันสามารถตรวจจับสิ่งกีดขวางเพื่อหลบหลีกได้ สนามของเราใช้ระบบ Vision System ที่มีกล้องติดอยู่ด้านบนเพื่อสแกนบาร์โค้ด (Aruco Markers) สำหรับระบุตำแหน่งของ OTV
รายละเอียดทางเทคนิคเพิ่มเติม
หุ่นยนต์วิจัยทางน้ำ (Aquatic Research Robotics)
Cool Water Mission OTV (Ocean Terminal Vehicle) เป็นหุ่นยนต์ที่ทนทานและกันน้ำได้ สร้างขึ้นเพื่อตรวจสอบสภาพแวดล้อมใต้น้ำ
- Watertight Motor Housing: มุ่งเน้นการแยกส่วนทางกลของมอเตอร์ DC และส่วนควบคุมของ Arduino ไว้ในโครงสร้างที่กันน้ำได้ Arduino ควบคุมการนำทางผ่าน H-Bridge driver เฉพาะ
- Environmental Telemetry: มี DS18B20 waterproof temperature probes ในตัวเพื่อบันทึกโปรไฟล์อุณหภูมิของน้ำในระดับความลึกต่างๆ
วิธีการออกแบบ
- Fusion 360 Prototyping: เน้นย้ำความสำคัญของการสร้างแบบจำลองด้วย CAD สำหรับหุ่นยนต์ทางน้ำ เพื่อให้มั่นใจในเรื่องการลอยตัวและการกระจายน้ำหนักที่เหมาะสม ก่อนจะลงมือสร้างจริงและทดสอบในสนาม