ปัญหาที่เจอ
จากข้อมูลทางสถิติ พบว่าประมาณ 1 ใน 100,000 คน มีภาวะกล้ามเนื้ออ่อนแรง (Myopathy) ไม่ว่าจะเป็นชนิดไหนก็ตาม
ตัวเลขข้างต้นนี่เรียกได้ว่าทำให้ช็อคได้เลย เพราะคนกลุ่มนี้ส่วนใหญ่ไม่สามารถใช้กำลังกายได้เต็มที่ เนื่องจากโรคกล้ามเนื้ออ่อนแรงที่จำกัดศักยภาพการทำงานของร่างกาย บ่อยครั้งก็ทำให้พวกเขาจากที่ควรจะเป็นกำลังสำคัญ กลับกลายเป็นภาระแทน (เศร้าปาย)
ทางออกของเรา
เจ้าเครื่องนี้แหละน้อง คือคำตอบ! มันช่วยเพิ่มพลังให้ผู้ใช้ด้วยมอเตอร์เซอร์โว MG995 ทำให้กล้ามเนื้อไม่ล้าเมื่อต้องทำงานหนักนานๆ และยังชดเชยกำลังที่เสียไปจากโรคกล้ามเนื้ออ่อนแรงได้อีกด้วย งานนี้จัดไปวัยรุ่น! เอาไปใช้ได้หลายสถานการณ์เลย เช่น:-
- สวมใส่สำหรับคนที่ทำงานใช้แรงกายเยอะๆ
- สวมใส่สำหรับคนที่มีกำลังกล้ามเนื้อต่ำกว่าค่าเฉลี่ยของมนุษย์ทั่วไป
- สวมใส่สำหรับคนที่ทำงานหนักแบบสุดๆ เช่น คนตัดไม้
หลักการทำงานของโปรเจค
โปรเจคนี้ทำงานตามขั้นตอนต่อไปนี้:-
- เซนเซอร์ TTP223 ตัวหนึ่งตรวจจับการสัมผัสที่แขน แล้วส่งสัญญาณไปยัง Arduino UNO
- Arduino UNO ตีความสัญญาณและตรวจสอบว่าเซนเซอร์นั้นอยู่ตำแหน่ง "ขึ้น" หรือ "ลง"
- ถ้าสัญญาณมาจากเซนเซอร์ด้านบน Arduino จะสั่งให้เซอร์โวหมุนขึ้น และถ้ามาจากเซนเซอร์ด้านล่าง มันจะสั่งให้เซอร์โวหมุนลง
- เมื่อเซอร์โวหมุน แขนที่ต่ออยู่กับมันก็จะขยับตาม ซึ่งผลักดันที่รองแขนให้เคลื่อนไหวไปในทิศทางนั้นๆ เป็นการให้พลังเสริมจากภายนอกกับแขนผู้ใช้
ลงลึกกันแบบเทคนิค (Technical Deep-Dive)
- การวิเคราะห์การสัมผัสแบบ Capacitive และเจตนาผู้ใช้:
- ชุดเซนเซอร์ TTP223: ใช้โมดูล capacitive touch แยกสองตัวเพื่อตรวจจับการเข้าใกล้ของผิวหนังโดยไม่ต้องกดทับ (สำคัญมากสำหรับผู้ใช้ที่มีกล้ามเนื้อลีบรุนแรง) การวิเคราะห์เกี่ยวข้องกับการวัด "ความล่าช้าของการเปลี่ยนแปลงไดอิเล็กทริก" เมื่อนิ้วมนุษย์เปลี่ยนค่าความจุไฟฟ้าเฉพาะที่ IC TTP223 จะส่งสัญญาณลอจิกสูงไปยัง Arduino การวินิจฉัยเน้นที่ "การลดการทำงานผิดพลาด" เพื่อให้แน่ใจว่า EMI จากสิ่งแวดล้อมหรือเหงื่อจะไม่ทำให้โครงกระดูกภายนอกทำงานผิดจังหวะ
- การตรวจสอบสถานะลอจิก: Arduino ทำการประเมินสถานะอย่างต่อเนื่อง การวิเคราะห์รวมถึงการยืนยัน "การล็อคการทำงานพร้อมกัน" เพื่อให้แน่ใจว่าถ้าเซนเซอร์ capacitive ทั้งตัว 'ขึ้น' และ 'ลง' ถูกกระตุ้นพร้อมกัน ระบบจะเข้าสู่สถานะสแตนด์บายที่ปลอดภัย ป้องกันไม่ให้เซอร์โวเริ่มต้นทำงานซึ่งอาจทำให้ฮาร์ดแวร์เสียหายได้
- การเคลื่อนไหวทางไฟฟ้ากลและวิเคราะห์ระบบจ่ายไฟ:
- การควบคุมทิศทางแรงบิดของ MG995: แปลงสัญญาณ PWM 5V ให้เป็นการหมุนเชิงมุมทางกายภาพ การวิเคราะห์เน้นที่ "การกำหนดจังหวะการหมุน" โดยแมปการกระตุ้นดิจิทัลให้เป็นลูป
servo.write()ที่ช้าและควบคุมได้ แทนที่จะเป็นการสวิงที่รุนแรงและทันที ซึ่งรับประกันแรงช่วยเหลือที่ลื่นไหล 50N ที่ประสานงานได้ดีกับกลไกทางชีวภาพตามธรรมชาติของผู้ใช้ - การแยกระบบจ่ายไฟกระแสสูง: สำหรับจ่ายไฟให้ MG995 การวินิจฉัยเน้นที่ "การหลีกเลี่ยงไฟตกเนื่องจากกระแสติดขัด" เพราะ MG995 สามารถดึงกระแสได้สูงถึง 1.2A เมื่อรับโหลดหนัก ระบบจะแยกแหล่งจ่ายไฟ (VCC) ของเซอร์โวไปยัง Power Bank ความจุสูงโดยตรง ข้ามเรกูเลเตอร์ 5V บนบอร์ด Arduino ที่เปราะบาง ซึ่งไม่อย่างนั้นอาจพังยับเยินภายใต้โหลดแบบ inductive ได้
- การควบคุมทิศทางแรงบิดของ MG995: แปลงสัญญาณ PWM 5V ให้เป็นการหมุนเชิงมุมทางกายภาพ การวิเคราะห์เน้นที่ "การกำหนดจังหวะการหมุน" โดยแมปการกระตุ้นดิจิทัลให้เป็นลูป
สู้งานนะน้อง! ห้ามช็อตนะตัวนี้
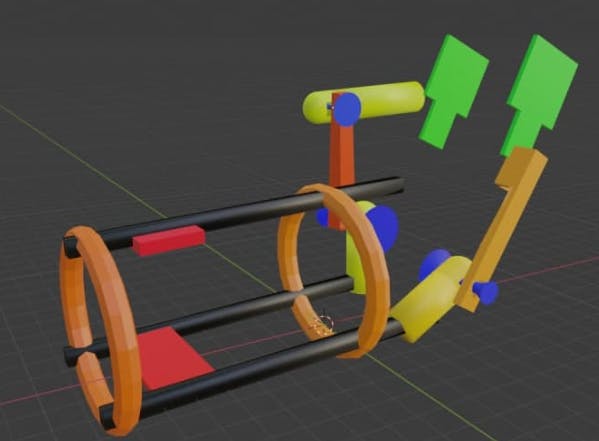
การออกแบบ
อุปกรณ์ที่ยังไม่มีวงจร :-
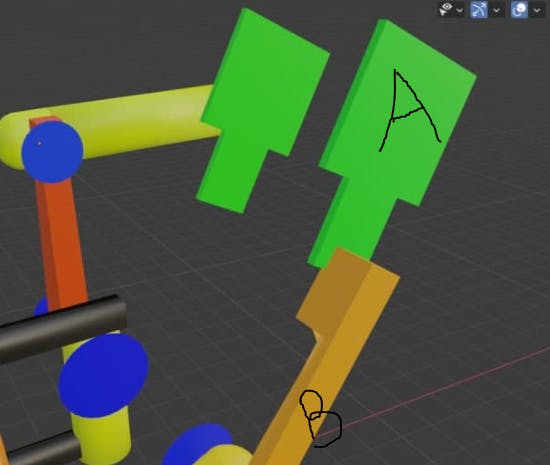
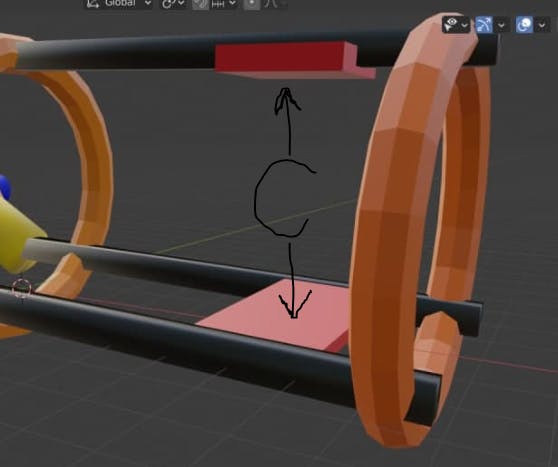
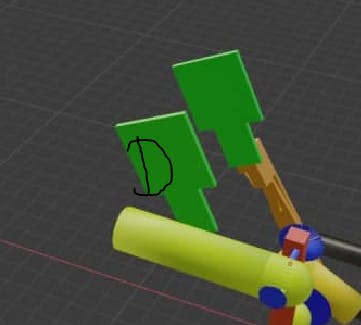
ตำแหน่งต่างๆ ในอุปกรณ์ที่จะใช้กาวติดอุปกรณ์อิเล็กทรอนิกส์:-
วิศวกรรมและการนำไปใช้
- กลศาสตร์-โทโพโลยี และการวิเคราะห์เชิงสรีรศาสตร์ (Forensics):
- จลนศาสตร์ของชิ้นส่วนแข็งเกร็ง (Rigid-Linkage Kinetics): แปลงการเคลื่อนที่แบบหมุนของเซอร์โวให้เป็นแรงยกในแนวเส้นตรงผ่านแขนโครงสร้างที่พิมพ์จากเครื่อง 3D พริ้นเตอร์ การวิเคราะห์รวมถึงการวัด "ประสิทธิภาพของโมเมนต์แขน (Moment-Arm Efficiency)" เพื่อใช้ประโยชน์จากแรงบิดสถิต 50N ของเซอร์โว MG995 ให้เต็มที่บริเวณจุดหมุน (pivot-joint) ของข้อศอกมนุษย์
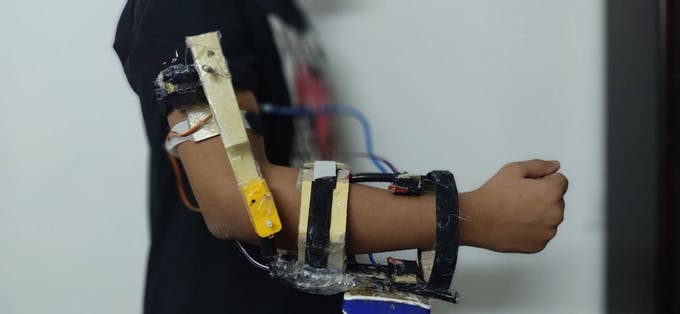
- การปรับปรุงโครงสร้างฐานทางกายภาพ (Physical-Substrate Iteration): ใช้การผสมผสานระหว่างสายรัดตีนตุ๊กแก, ซิปไทล์ และกาวร้อน เพื่อปรับอุปกรณ์อิเล็กทรอนิกส์ที่แข็งให้เข้ากับรูปทรงที่อ่อนนุ่มและเคลื่อนไหวได้ของแขนมนุษย์ การวิเคราะห์เน้นที่ "การลดความล้มเหลวของลอจิกจากแรงสั่นสะเทือน (Vibration-Induced Logic-Failure Mitigation)" เพื่อให้แน่ใจว่าการเชื่อมต่อบนแผงโปรโตบอร์ดที่บัดกรีไว้ยังคงทำงานต่อเนื่องระหว่างการใช้งานที่ต้องออกแรงเป็นเวลานาน
- ลอจิกระบบและวิธีการทำงาน (Heuristics):
- การนำไปใช้นี้แสดงให้เห็นถึง "สุนทรียภาพของชีว-แมคคาทรอนิกส์ (Bio-Mechatronic Aesthetic)" ซึ่งพิสูจน์ว่าฮาร์ดแวร์โอเพ่นซอร์สราคาประหยัดสามารถถูกดัดแปลงอย่างสุดขั้วเพื่อสร้างเป็นแขนเทียมทางการแพทย์ที่เปลี่ยนชีวิตผู้คนได้ การวิเคราะห์รวมถึงการวัด "ความล่าช้าจากความตั้งใจสู่การทำงาน (Intent-to-Actuation Latency)" ซึ่งเป็นปัจจัยสำคัญในการสร้างความสัมพันธ์แบบพึ่งพาอาศัยกันระหว่างผู้ใช้ที่ร่างกายอ่อนแอกับการเสริมกำลังโครงสร้างจากหุ่นยนต์
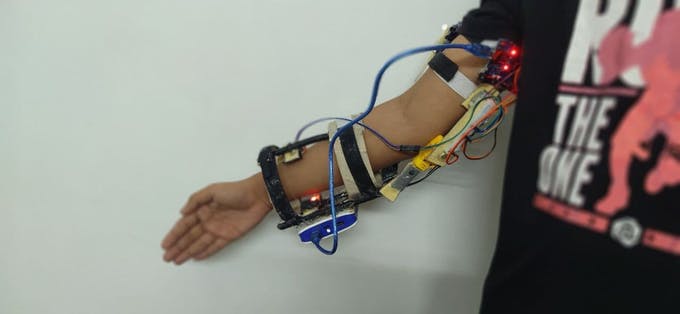
วงจรที่เสร็จสมบูรณ์ แสดงการรวมตัวของ Arduino, เซ็นเซอร์ TTP223 และระบบจ่ายไฟ แสดงดังด้านล่าง
การสาธิต
ความคาดหวังในอนาคต
ผมหวังว่าเจ้าเครื่องนี้จะช่วยลดความเหนื่อยยากจากงานที่ใช้แรงเยอะๆ และเพิ่มความเร็วในการทำงานแบบใช้แรงคนได้อีกโขเลย
สรุป
เจ้า Myo-Skeleton ตัวนี้ถือเป็นสุดยอดของ การวินิจฉัยเทคโนโลยีช่วยเหลือแบบอะซิงโครนัส เลยนะน้อง! ด้วยการเชี่ยวชาญ การวิเคราะห์สัมผัสแบบ capacitive-touch และ จลนศาสตร์ของเซอร์โวแรงบิดสูง โปรเจกต์นี้ได้สร้างกรอบงานชีวกลศาสตร์ระดับมืออาชีพที่เฉียบคม ช่วยให้เห็นภาพการเคลื่อนไหวของร่างกายชัดเจนแจ๋วผ่านการเสริมกำลังด้วยระบบไฟฟ้ากลไกสุดล้ำ
Kinematic Persistence: Mastering human-augmentation through capacitive-torque forensics.