โปรเจกต์นี้เอาไว้วัดระยะของสิ่งกีดขวางด้วยโมดูลวัดระยะแบบอัลตราโซนิก (Ultrasonic) วีดีโอด้านล่างมีสอนแบบจัดเต็มให้ดูเลย
มุมมองของโปรเจกต์
Ultrasonic Rangefinder with Processing นี่แหละคือ "เรดาร์ดิจิทัล" พื้นฐานและสร้างสรรค์ ที่เป็นสะพานเชื่อมสำหรับนักพัฒนาไฟฟ้าอิเล็กทรอนิกส์ยุคใหม่ ด้วยการโฟกัสที่บล็อคสำคัญๆ อย่าง ตรรกะการสะท้อนเสียงของ HC-SR04 และ ระบบการแมปพิกัดด้วย Processing น้องจะได้เรียนรู้วิธีกำหนดทิศทางและทำให้การแสดงผลระยะเป็นอัตโนมัติ โดยใช้ตรรกะซอฟต์แวร์เฉพาะทางและการตั้งค่าพื้นฐานที่แข็งแรง
การลงมือทำจริง: คลื่นเสียงและการแสดงผลแบบโพลาร์
โปรเจกต์นี้จะเผยให้เห็นชั้นต่างๆ ที่ซ่อนอยู่ในอันตรกิริยาจากเซนเซอร์ธรรมดาสู่ข้อมูล:
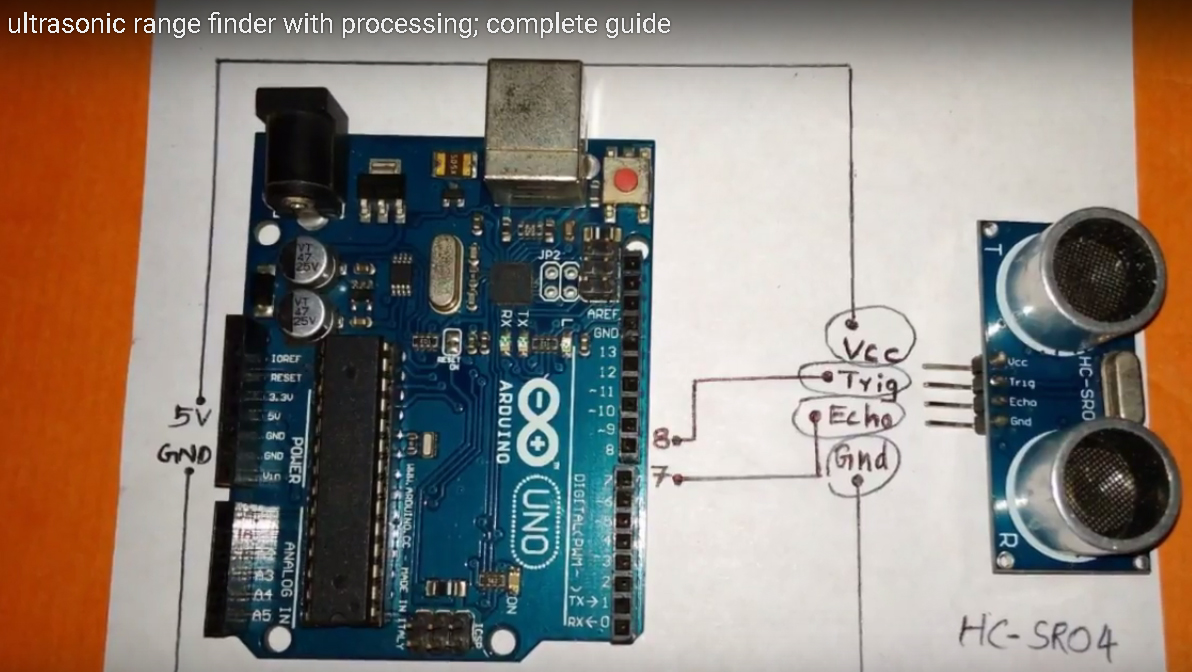
- ชั้นการระบุ: เซนเซอร์ HC-SR04 ทำหน้าที่เป็นดวงตาคลื่นเสียงความละเอียดสูง วัดระยะไปยังวัตถุด้วยจังหวะไมโครวินาทีของเสียงสะท้อน
- ชั้นการแปลง: ระบบใช้พินดิจิทัล 2 ขาเพื่อรับพัลส์ PWM ความเร็วสูง สำหรับงานเซนซิ่งที่สำคัญ
- ชั้นอินเทอร์เฟซการขับเคลื่อน: เซอร์โวมอเตอร์ SG90 ให้ฟีดแบ็กทางภาพและกลไกความละเอียดสูงสำหรับมุมสแกนเรดาร์ (เช่น 0-180 องศา)
- ชั้นอินเทอร์เฟซการสื่อสาร: สะพานซีเรียล (Serial Bridge) ความเร็วสูง ให้การส่งข้อมูลแบบแมนนวลหรือตรวจสอบสถานะอัตโนมัติระหว่างการปรับเทียบเริ่มต้น
- ตรรกะของ Processing: โค้ด Processing ใช้กลยุทธ์ "การแมปแบบโพลาร์" (หรือการส่งสัญญาณเรดาร์): มันตีความคู่ข้อมูลระยะ-มุมจากพอร์ตซีเรียล แล้วจับคู่กับส่วนโค้งกราฟิก เพื่อสร้างพล็อตระยะที่ปลอดภัยและเป็นจังหวะบนหน้าจอ
- ลูปการสื่อสาร: รหัสระยะทางจะถูกส่งเป็นจังหวะไปยัง Serial Monitor ขณะปรับเทียบเริ่มต้น
โครงสร้างพื้นฐานฮาร์ดแวร์-ซอฟต์แวร์
- Arduino Uno: "สมอง" ของโปรเจกต์ จัดการการสุ่มตัวอย่างเซนเซอร์หลายทิศทางและประสานงานระหว่างเซอร์โวและซิงค์ซีเรียล
- เซนเซอร์อัลตราโซนิก HC-SR04: ให้ "ลิงค์การวัด" ที่ชัดเจนและน่าเชื่อถือสำหรับเครื่องวัดระยะ
- เซอร์โวมอเตอร์ SG90: ให้อินเทอร์เฟซทางกายภาพที่มีความจุสูงและเชื่อถือได้ สำหรับ "ภารกิจเรดาร์" ครั้งแรกของน้อง
- เบรดบอร์ด: วิธีที่สะดวกสำหรับการทำต้นแบบวงจรอิเล็กทรอนิกส์เรดาร์และเชื่อมต่อทุกองค์ประกอบโดยไม่ต้องบัดกรี
- Processing (บน PC): สำคัญสำหรับการให้การแสดงผล 2D/3D ที่ชัดเจนและประหยัดพลังงาน สำหรับภารกิจตรรกะซอฟต์แวร์แรกของน้อง
- สาย Micro-USB: ใช้โปรแกรม Arduino ของน้องและเป็นอินเทอร์เฟซหลักสำหรับตัวควบคุมระบบ
[!IMPORTANT] การสื่อสารแบบซีเรียล ต้องการ การแมป Baud Rate ที่แม่นยำ (ปกติคือ 9600) ระหว่าง Arduino กับโค้ด Processing อย่าลืมตรวจสอบให้แน่ใจว่ามี ฟลัก Fail-Safe ที่เหมาะสมไว้ด้วย ถ้าเซอร์โวทำงานหนักเกินไปนะตัวนี้!
ต่อยอดในอนาคต
- OLED Identity Dashboard Integration: เอาจอ OLED เล็กๆ ติดไว้ด้านหลังต้นแบบ เพื่อแสดง "ระยะวัตถุที่ใกล้ที่สุด" หรือ "แบตเตอรี่ (%)" ไปเลย
- Multi-sensor Climate Sync Synchronization: ต่อเซ็นเซอร์ตรวจจับการเคลื่อนไหวแบบพิเศษ (PIR Motion Sensor) เข้าไป เพื่อทำระบบ "แจ้งเตือนคน" แบบแม่นยำสูง ส่งข้อมูลผ่านคลาวด์แบบไร้สาย
- Cloud Interface Registration Support Synchronization: สร้างเว็บแดชบอร์ดเฉพาะทางบนมือถือผ่าน WiFi/BT เพื่อติดตามและบันทึกประวัติการทำงานของเรดาร์ทั้งหมดแบบเป๊ะๆ
- Advanced Velocity Profile Customization Support: เพิ่ม "Machine Learning (vCore)" แบบเฉพาะทางลงในโค้ด เพื่อให้ระบบทริกเกอร์ปรับเปลี่ยนอัตโนมัติตามความสูงของผู้ใช้! จัดไปวัยรุ่น
Ultrasonic Rangefinder with Processing นี่แหละโปรเจคต์เด็ดสำหรับสายวิทย์ที่อยากได้เครื่องมือแสดงผลแบบอินเทอร์แอคทีฟและน่าสนใจขึ้นอีกขั้น! สู้งานนะน้อง ห้ามช็อตนะตัวนี้