สำรวจโลกแบบดาวเคราะห์: โปรเจกต์ Wi-Fi Rover
แรงบันดาลใจจากรถโรเวอร์สุดล้ำที่วิ่งสำรวจดาวอังคาร งานนี้เราจะเอาแนวคิดการสำรวจดาวเคราะห์มาเล่นในบ้านเราเอง! ด้วยการดึงพลังการเชื่อมต่อความเร็วสูงของ NodeMCU (ESP8266) เราจะสร้างโรเวอร์แรงบิดสูงที่บังคับผ่านเว็บเบราว์เซอร์หรือแอปมือถือได้เลย แสดงให้เห็นหลักการ การควบคุมระยะไกลผ่านอินเทอร์เน็ต (IoT Teleoperation) งานนี้หล่อเท่แน่นอน!
ควบคุมได้ทั้งในบ้านและทั่วโลก: ไฮบริดเน็ตเวิร์ค
โรเวอร์ตัวนี้ทำงานบนสแต็กเน็ตเวิร์คที่ปรับใช้ได้หลายสถานการณ์:
- โหมด AP (Access Point): โรเวอร์จะปล่อยเครือข่าย Wi-Fi ของตัวเองเป็น "Direct-Link" ทำให้ควบคุมได้รวดเร็ว แถมไม่ต้องพึ่งเราเตอร์ เหมือนการเชื่อมต่อดาวเทียมแบบจุดต่อจุดเลย
- อินเทอร์เฟซเว็บเซิร์ฟเวอร์: ESP8266 จะโฮสต์แดชบอร์ด HTML/JS แบบมินิมอล เวลาน้องขยับจอยสติ๊กดิจิทัลบนหน้าเว็บ เบราว์เซอร์จะส่งคำขอ HTTP แบบอะซิงโครนัสไปที่โรเวอร์ อัพเดทสถานะมอเตอร์ภายในมิลลิวินาที
- ควบคุมข้ามโลกด้วย Blynk: ถ้าอยากควบคุมแบบ "สไตล์ดาวอังคาร" จริงๆ จากอีกซีกโลก โปรเจกต์นี้ก็รองรับ แพลตฟอร์ม Blynk IoT ด้วยนะ ควบคุมผ่านเครือข่ายมือถือหรือ Wi-Fi ที่อยู่ไกลๆ ได้สบายๆ
จัดการไฟเลี้ยงและขับมอเตอร์ด้วย L293D H-Bridge
การขับมอเตอร์ DC แรงบิดสูง ต้องใช้กระแสที่ไมโครคอนโทรลเลอร์จ่ายไม่ไหว (ห้ามช็อตนะตัวนี้!)
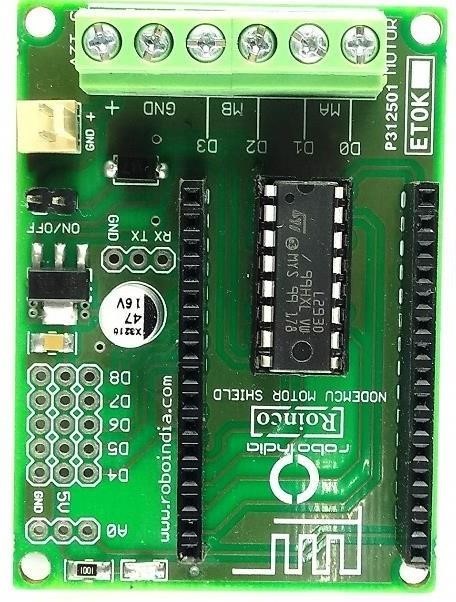
- NodeMCU Motor Shield: บอร์ดเสริมตัวนี้มาพร้อมชิป L293D Quadruple High-Current Half-H Driver ช่วยให้เราควบคุมมอเตอร์ DC สองตัวให้วิ่งไปข้างหน้า ถอยหลัง และเลี้ยวแบบ "skid-steering" ได้ฉิว
- แหล่งจ่ายไฟแยกอิสระ: เพื่อป้องกันสัญญาณรบกวนจากมอเตอร์ทำให้ ESP8266 รีเซ็ต บอร์ด Shield รองรับการจ่ายไฟสองทางแยกกัน ทำให้มอเตอร์ 12V ดึงไฟจากแบตเตอรี่ความจุสูงได้เต็มที่ ในขณะที่ฝั่งลอจิกยังคงเสถียรที่ 5V
งานนี้ใช้ได้จริง: จากสอดแนมถึงงานป้องกัน
นอกจากจะเป็นหุ่นยนต์เล่นบนโต๊ะสุดเท่แล้ว ดีไซน์ยังขยายขนาดเพื่อการค้าหรืองานรักษาความปลอดภัยได้อีก:
- งานสอดแนม/ตรวจสอบ: เพิ่มกล้อง Wi-Fi (เช่น ESP32-CAM) เข้าไป ก็กลายเป็นรถสำรวจไร้คนขับ (UGV) สำหรับลุยพื้นที่แคบหรืออันตรายได้เลย
- ตรวจจับอันตราย: แพลตฟอร์มแบบโมดูลาร์รองรับการติดตั้งเครื่องตรวจจับโลหะ (จำลองการหาทุ่นระเบิด) หรือเซ็นเซอร์แก๊ส เพื่อตรวจสอบคุณภาพอากาศในสนามรบหรือพื้นที่อุตสาหกรรม
เป้าหมายของโปรเจกต์:
รถโรเวอร์สำรวจดาวอังคารคือยานพาหนะที่วิ่งไปมาบนพื้นผิวดาวอังคารหลังจากลงจอดแล้ว
การควบคุมการเคลื่อนที่ของหุ่นยนต์ผ่านอินเทอร์เน็ตเป็นวิธีที่ง่ายวิธีหนึ่ง เพราะผู้ใช้แค่ต้องเข้าถึงหน้าเว็บที่กำหนดไว้เพื่อบังคับมัน ระบบนี้สามารถนำไปใช้ในงานด้านการป้องกันประเทศได้ เช่น ตรวจจับทุ่นระเบิดในสนามรบ หรือตรวจจับวัตถุระเบิดโดยการติดตั้งเซ็นเซอร์ตรวจจับโลหะบนตัวมัน นอกจากนี้ ขนาดของอุปกรณ์ยังสามารถทำให้เล็กลงได้ตามการใช้งานเฉพาะทาง
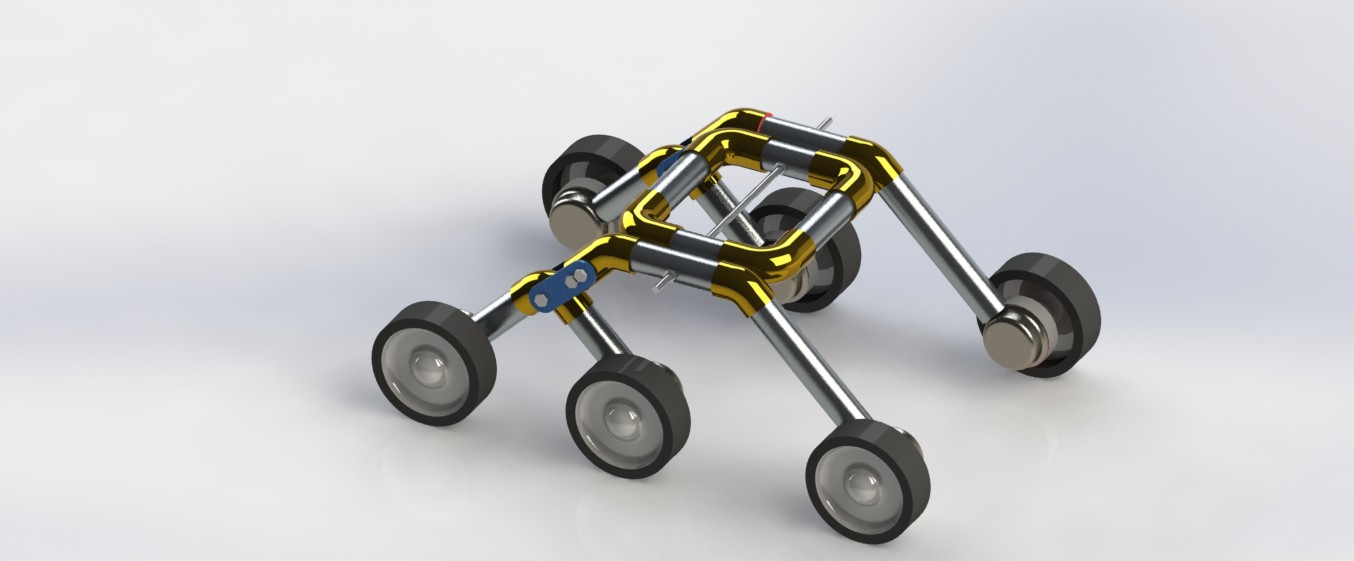
ดีไซน์ด้วย CAD:

แผนภาพวงจร:
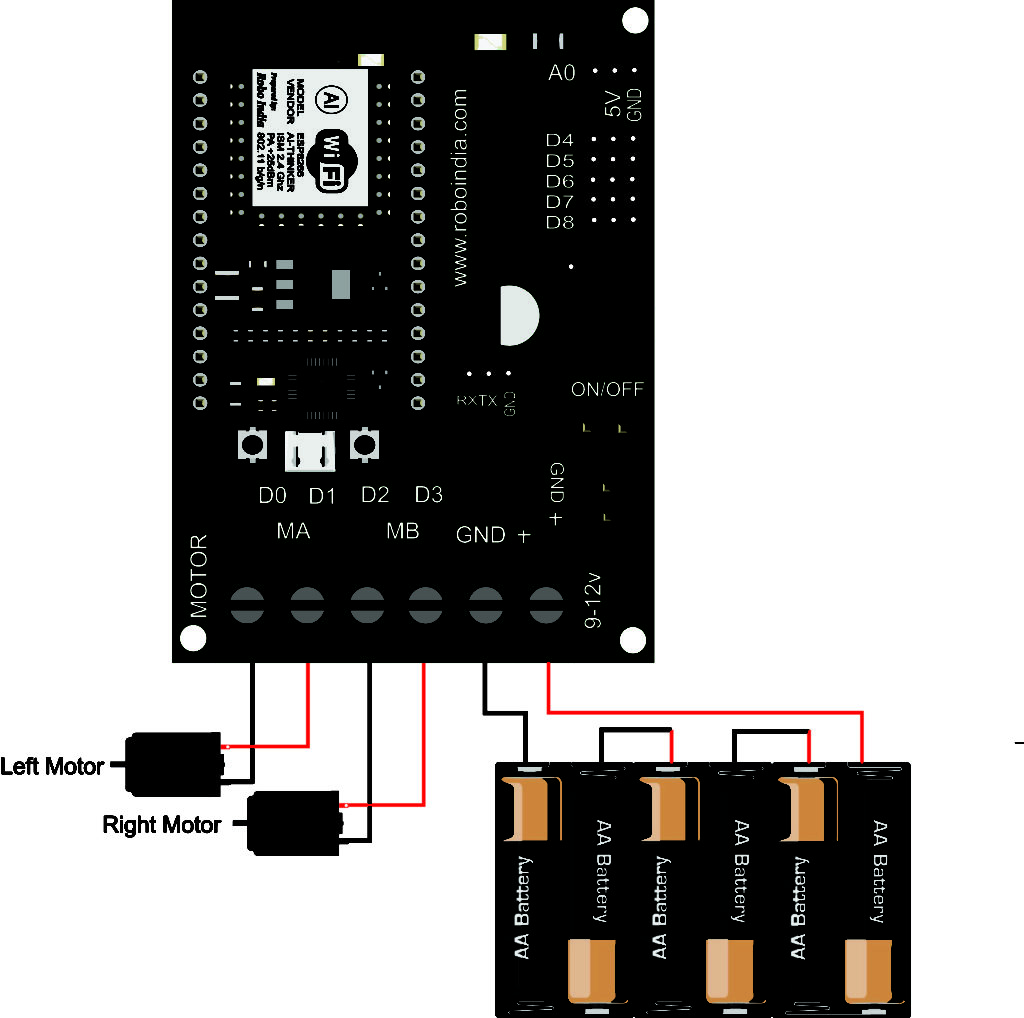
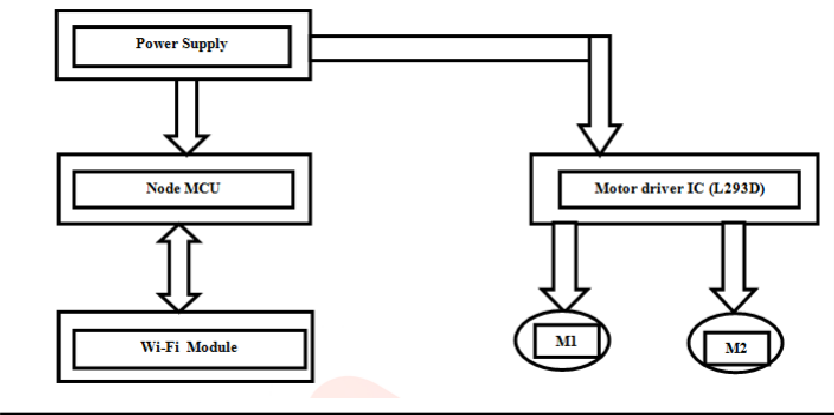
ระบบที่นำเสนอ:
แหล่งจ่ายไฟ DC 12 Volt ถูกจ่ายให้กับไมโครคอนโทรลเลอร์และ Motor Driver ไมโครคอนโทรลเลอร์รับอินพุตและส่งเอาต์พุตไปยังโมดูล Wi-Fi โดยมีลูกศรแสดงทิศทางระหว่างไมโครคอนโทรลเลอร์และโมดูล Wi-Fi Motor Driver มีลูกศรแสดงทิศทางระหว่างไมโครคอนโทรลเลอร์กับการควบคุมผ่านมือถือ/อินเทอร์เน็ต
ระบบควบคุม:
การทำงานกับหุ่นยนต์ควบคุมผ่าน Wi-Fi นั้นง่ายมาก เราแค่ต้องลากหรือเลื่อนจอยสติ๊กไปในทิศทางที่เราต้องการให้หุ่นยนต์เคลื่อนที่ ถ้าอยากให้หุ่นยนต์เดินหน้า ก็ลากวงกลมจอยสติ๊กไปด้านหน้า เช่นเดียวกัน เราสามารถให้หุ่นยนต์เลี้ยวซ้าย ขวา หรือถอยหลังได้โดยการลากจอยสติ๊กไปในทิศทางนั้น พอเราปล่อยจอยสติ๊ก มันจะกลับมาที่ตำแหน่งกึ่งกลางและหุ่นยนต์จะหยุด แอป Blynk จะส่งค่าจากจอยสติ๊กสองแกนไปยัง [Arduino](https://s.shopee.co.th/7fUgFAWSki) ผ่านทาง Wi-Fi Arduino รับค่ามา เปรียบเทียบกับค่าที่กำหนดไว้ล่วงหน้า แล้วสั่งให้หุ่นยนต์เคลื่อนที่ไปในทิศทางนั้น
เราใช้แอปมือถือที่พัฒนาโดย Roboindia หลังจากสตาร์ทบอทแล้ว ให้ทำตามขั้นตอนนี้...
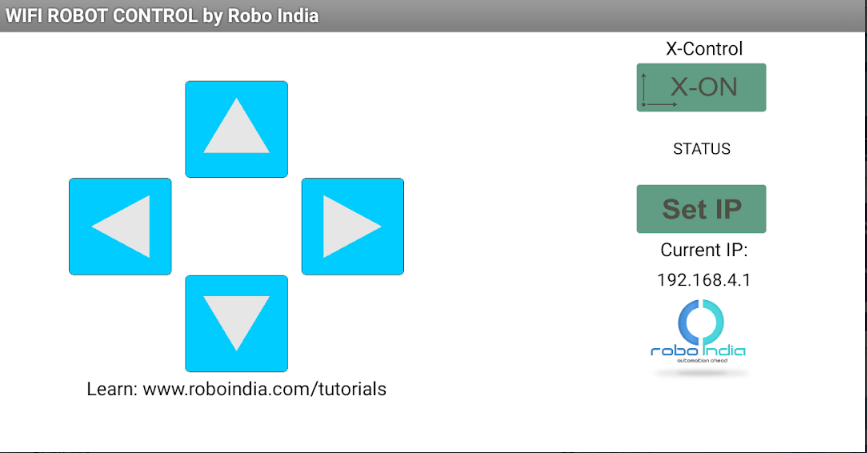
1. เชื่อมต่อมือถือของเรากับ Wi-Fi ของ Nodemcu (ในกรณีของพี่ ชื่อฮอตสปอตคือ "MyRobot" และรหัสผ่านคือ "iamnotarobot")
2. หลังจากนั้น ให้เพิ่มที่อยู่ IP ในแอป (ซึ่งน้องตั้งค่าไว้ในโปรแกรม) หลังจากขั้นตอนทั้งหมดนี้ มือถือก็จะกลายเป็นตัวควบคุมแล้วล่ะ
รายละเอียดอุปกรณ์:
มอเตอร์ และ Motor Driver L293D:
มอเตอร์ไฟฟ้าคือเครื่องจักรไฟฟ้าที่แปลงพลังงานไฟฟ้าเป็นพลังงานกล L293D เป็น Motor driver หรือ IC ขับมอเตอร์ทั่วไปที่ช่วยให้มอเตอร์ DC สามารถขับเคลื่อนได้ทั้งสองทิศทาง L293D เป็น IC 16 ขาที่สามารถควบคุมมอเตอร์ DC สองตัวพร้อมกันในทิศทางใดก็ได้ หมายความว่าสามารถควบคุมมอเตอร์ DC สองตัวด้วย L293D เพียงตัวเดียวได้ มันคือ Integrated Circuit (IC) แบบ Dual H-bridge Motor Driver L293D สามารถขับมอเตอร์ขนาดเล็กไปจนถึงมอเตอร์ใหญ่เงียบๆ ได้ ลองตรวจสอบ Voltage Specification ที่ท้ายหน้านี้สำหรับข้อมูลเพิ่มเติม
L293D เป็น Motor driver หรือ IC ขับมอเตอร์ทั่วไปที่ช่วยให้มอเตอร์ DC สามารถขับเคลื่อนได้ทั้งสองทิศทาง L293D เป็น IC 16 ขาที่สามารถควบคุมมอเตอร์ DC สองตัวพร้อมกันในทิศทางใดก็ได้ หมายความว่าสามารถควบคุมมอเตอร์ DC สองตัวด้วย L293D เพียงตัวเดียวได้ มันคือ Integrated Circuit (IC) แบบ Dual H-bridge Motor Driver L293D สามารถขับมอเตอร์ขนาดเล็กไปจนถึงมอเตอร์ใหญ่เงียบๆ ได้ ลองตรวจสอบ Voltage Specification ที่ท้ายหน้านี้สำหรับข้อมูลเพิ่มเติม
1. L293D เป็นไดรเวอร์แบบ quadruple high-current half-H ออกแบบมาเพื่อจ่ายกระแสไบไดเรกชันได้สูงสุดถึง 600-mA ที่แรงดันตั้งแต่ 4.5 V ถึง 36 V
2. อินพุตทั้งหมดเข้ากันได้กับ TTL เอาต์พุตแต่ละช่องเป็นวงจรขับแบบ totem-pole ที่สมบูรณ์ พร้อมทรานซิสเตอร์ sink แบบดาร์ลิงตันและแหล่งจ่ายแบบดาร์ลิงตันเทียม
3. ไดรเวอร์จะถูกเปิดใช้งานเป็นคู่ โดยไดรเวอร์ 1 และ 2 ถูกเปิดด้วย 1,2EN และไดรเวอร์ 3 และ 4 ถูกเปิดด้วย 3,4EN • เมื่ออินพุต enable เป็น high ไดรเวอร์ที่เกี่ยวข้องจะถูกเปิดใช้งานและเอาต์พุตจะทำงานและอยู่ในเฟสเดียวกับอินพุต
4. เมื่ออินพุต enable เป็น low ไดรเวอร์เหล่านั้นจะถูกปิดการใช้งานและเอาต์พุตจะปิดและอยู่ในสถานะอิมพีแดนซ์สูง
5. มีขา VCC1 แยกจาก VCC2 สำหรับอินพุตลอจิก เพื่อลดการกระจายพลังงานของอุปกรณ์
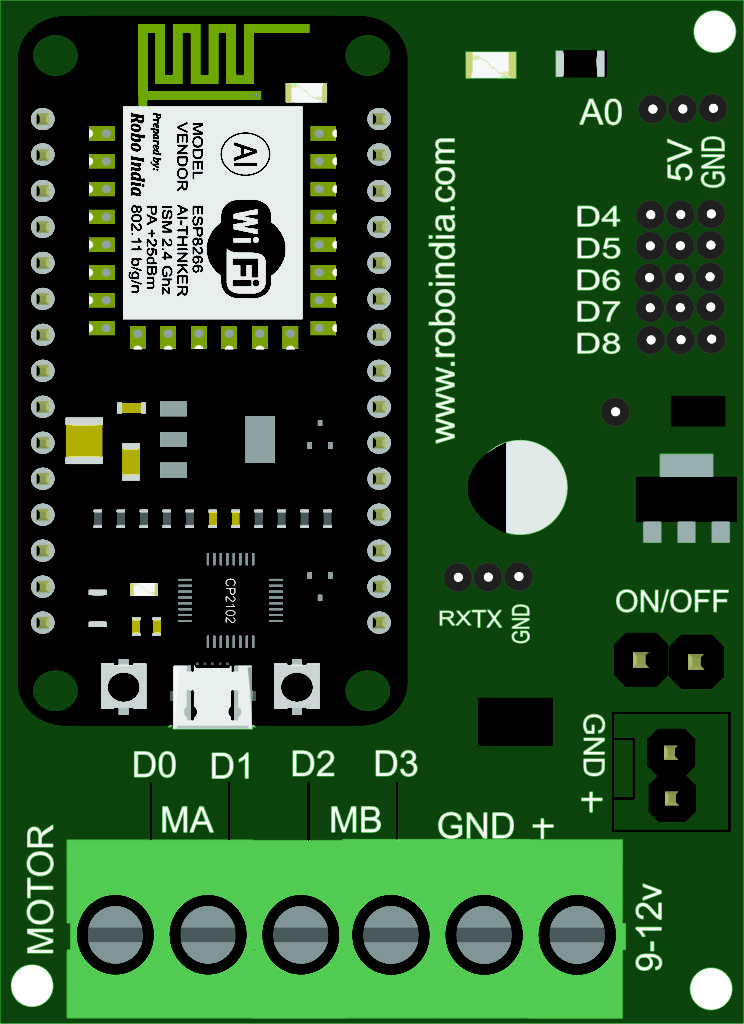
NodeMCU:
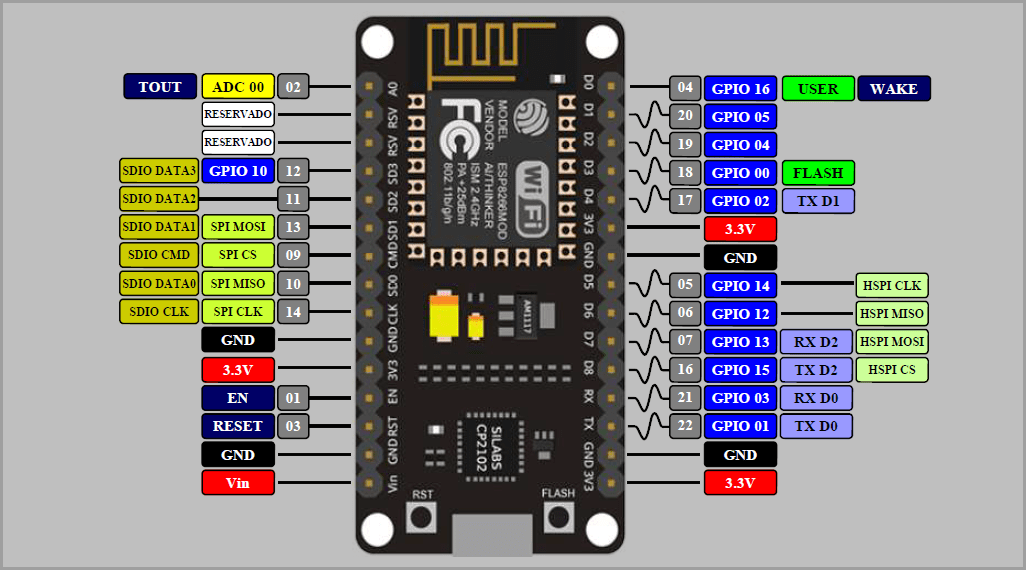

NodeMCU เป็นแพลตฟอร์ม IoT แบบโอเพนซอร์ส ประกอบด้วยเฟิร์มแวร์ที่ทำงานบนชิป Wi-Fi SoC ESP8266 จาก Espressif Systems และฮาร์ดแวร์ที่ใช้โมดูล ESP-12 เป็นพื้นฐาน คำว่า "NodeMCU" โดยค่าเริ่มต้นหมายถึงเฟิร์มแวร์มากกว่าชุดพัฒนาตัวเอง เฟิร์มแวร์ใช้ภาษาสคริปต์ Lua โดยอิงจากโปรเจกต์ Lua และสร้างบน Espressif NonOS SDK สำหรับ ESP8266 มันใช้โปรเจกต์โอเพนซอร์สหลายตัว เช่น lua-cjson และ spiffs
มอเตอร์:

- RPM ที่กำหนด 30
- แรงดันใช้งาน (VDC) 12
- แรงบิดที่กำหนด (kg-cm) 5
- แรงบิดขัด (Kg-Cm) 18.8
- กระแสโหลด (A) 0.3
- กระแสไร้โหลด 60 mA
- เส้นผ่านศูนย์กลางมอเตอร์ (mm) 32
- เส้นผ่านศูนย์กลางเพลา (mm) 6
- ความยาวเพลา (mm) 22
ล้อ:

ล้อตีนตะขาบพลาสติกคุณภาพสูง สำหรับมอเตอร์ที่มีเส้นผ่านศูนย์กลางเพลา 6 มม.
ขนาด:
1. เส้นผ่านศูนย์กลาง - 7 ซม.
2. ความกว้างของล้อ - 4 ซม.
3. รูเพลา - 6 มม.
4. มีสกรูให้สำหรับยึดล้อกับเพลามอเตอร์
แหล่งจ่ายไฟ:
ใช้แบตเตอรี่ 12V หรือเราใช้พาวเวอร์แบงก์มือถือเป็นแหล่งจ่ายไฟ ซึ่งให้เอาต์พุต 5V/2A
รายงานต้นทุน:
ชื่ออุปกรณ์ ราคา (ประมาณ)
Nodemcu 300
Motor Driver 345
ล้อ 199
มอเตอร์ 732
การประยุกต์ใช้และขอบเขตในอนาคต:
1. ใช้เป็นหุ่นยนต์สอดแนมได้
2. สำหรับระบบบ้านอัตโนมัติ
3. สำหรับควบคุมรถเข็นคนพิการ
4. สำหรับควบคุมอุปกรณ์ระยะไกล
5. สำหรับสำรวจพื้นที่อันตรายสูง ฯลฯ
6. สำหรับใช้เป็นเครื่องตรวจจับทุ่นระเบิดภาคพื้นดินไร้คนขับ