Intermediate
โปรเจกต์ e-structure UNO
ระบบทดลองสำหรับ Structural Health Monitoring (SHM) พัฒนาบนพื้นฐานของ Arduino

ระบบทดลองสำหรับ Structural Health Monitoring (SHM) พัฒนาบนพื้นฐานของ Arduino
▶ กดเพื่อดูวิดีโอสาธิตโปรเจกต์
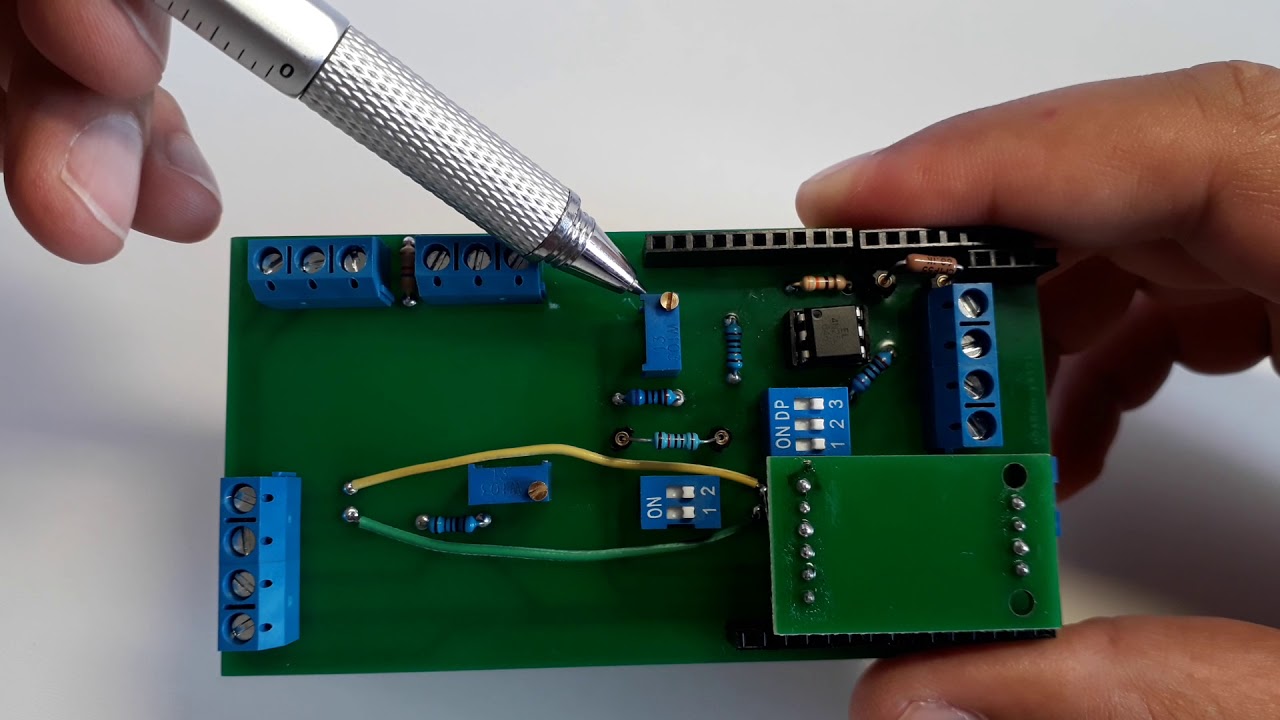
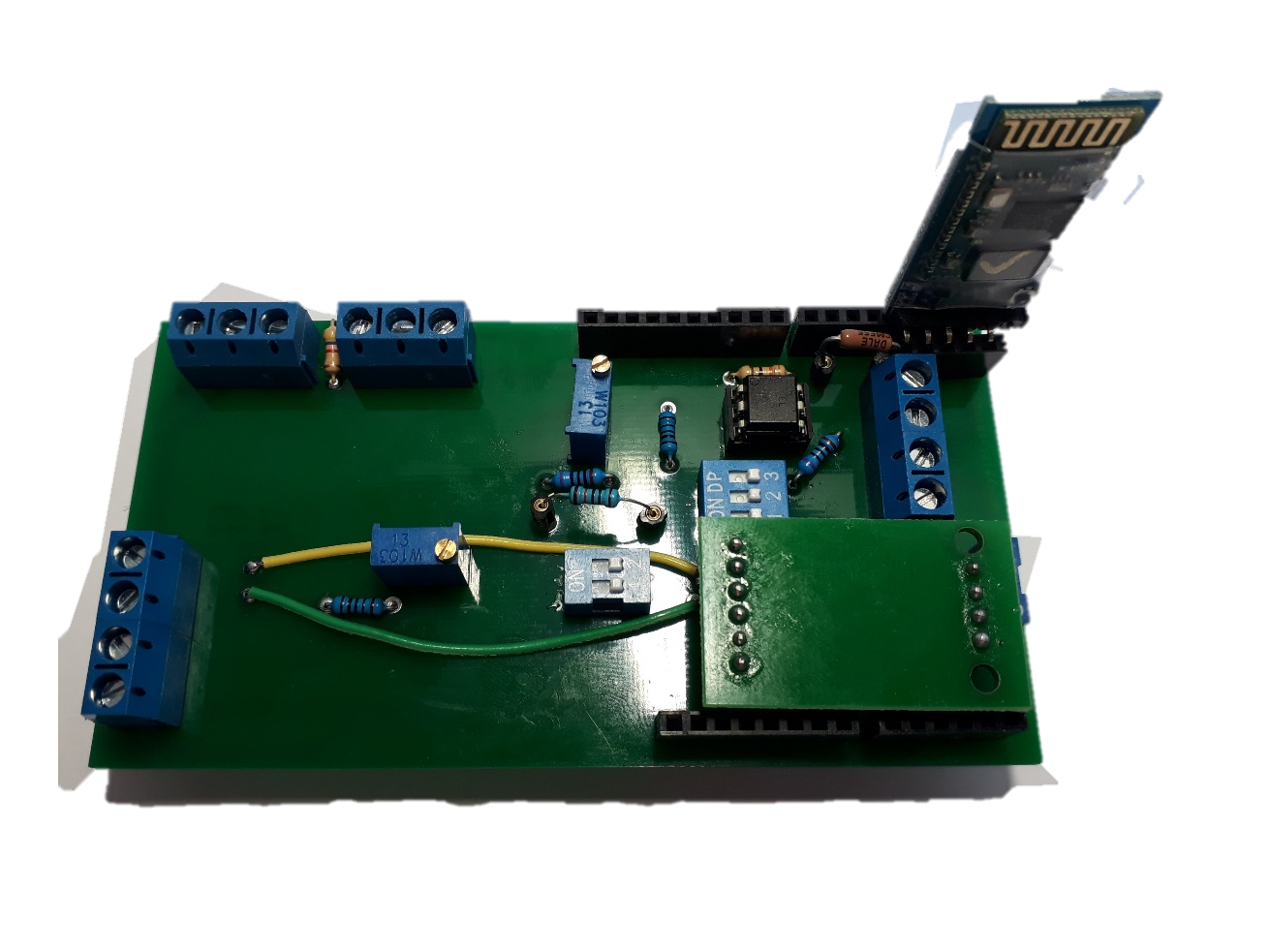
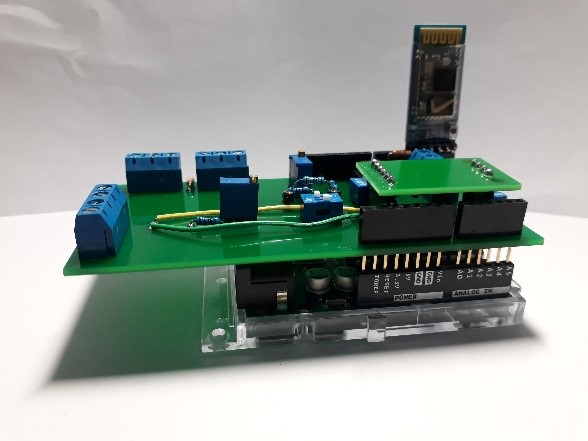
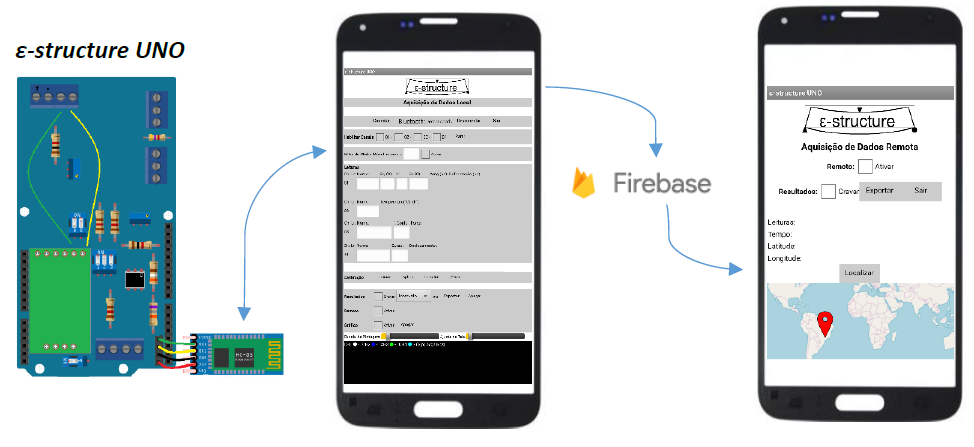
ระบบ ε-structure UNO (รูปที่ 1, 2 และ 3) เป็นข้อเสนอระบบทดลองสำหรับการทำ Structural Health Monitoring (SHM) โดยใช้พื้นฐานจาก platform Arduino® เพื่อใช้ในการวัดค่าต่างๆ ได้แก่: strain, displacement, force และ temperature
ระบบนี้มี hardware ที่ใช้งานร่วมกับ Board Arduino® รุ่น UNO R3 ได้ รวมถึงมี software สำหรับอุปกรณ์เคลื่อนที่ (smartphones และ tablets) ที่ใช้ระบบปฏิบัติการ Android® ซึ่งพัฒนาผ่าน platform MIT App Inventor
เวอร์ชันนี้รองรับการใช้งานร่วมกับ Sensor / Transducers ดังต่อไปนี้:
· Temperature sensor DS18B20®.
การพัฒนาเวอร์ชันอื่น (ก่อนหน้า ε-structure UNO) ของระบบทดลองนี้ เกิดขึ้นระหว่างการวิจัยระดับ Master of Science ของผู้พัฒนา ดังนั้นสามารถดูข้อมูลเพิ่มเติมได้จาก วิทยานิพนธ์ (dissertation).
คุณสามารถดาวน์โหลด คู่มือพื้นฐานสำหรับการสร้างและการใช้งาน ε-structure UNO ได้ที่ลิงก์ www.e-structure.org ซึ่งปัจจุบันมีเวอร์ชันภาษาอังกฤษและภาษาโปรตุเกส
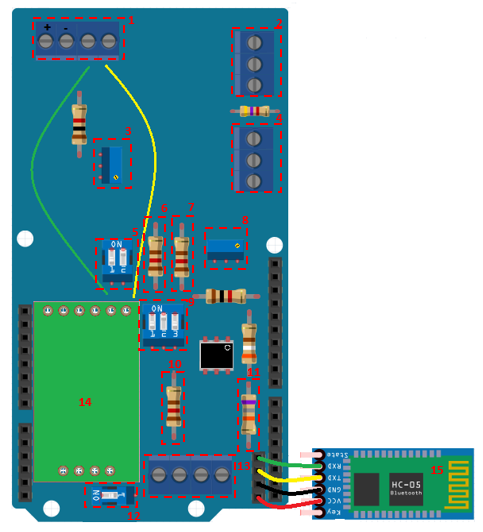
การใช้งานระบบ ε-structure UNO จำเป็นต้องใช้ทั้ง hardware ที่เชื่อมต่อกับ Arduino® UNO และ Sensor ที่เข้ากันได้ รวมถึงการใช้งาน software ซึ่งทั้งคู่จะอธิบายไว้ด้านล่าง ส่วนประกอบที่สำคัญของ hardware ถูกแสดงไว้ตามหมายเลขในรูปที่ 1 ดังนี้:
1. Terminal สำหรับเชื่อมต่อกับ Load Cell;
2. Terminal สำหรับเชื่อมต่อกับ Displacement transducer;
3. Potentiometer สำหรับปรับจูนค่าที่อ่านได้จาก Load Cell;
4. Terminal สำหรับเชื่อมต่อกับ Temperature sensor;
5. Switch สำหรับตั้งค่าการเชื่อมต่อแบบ ¼ bridge¹, ½ bridge¹ และ complete bridge¹;
6. Resistor² แบบถอดเปลี่ยนได้ (120Ω, หรือ 350 Ω หรือ 1000 Ω ขึ้นอยู่กับการใช้งาน);
7. Resistor² แบบคงที่ (100Ω หรือ 120Ω - ต้องมีค่าเดียวกับรายการที่ 10);
8. Potentiometer สำหรับปรับจูนค่าที่อ่านได้จาก Strain Gauge;
9. Switch สำหรับตั้งค่าการเชื่อมต่อแบบ ¼ bridge¹, ½ bridge¹ และ complete bridge¹;
10. Resistor² แบบคงที่ (100Ω หรือ 120Ω - ต้องมีค่าเดียวกับรายการที่ 7);
11. Resistor Shunt แบบถอดเปลี่ยนได้ (68, 1kΩ หรือเปลี่ยนเป็นค่าความต้านทานที่ต้องการ);
12. Switch สำหรับตั้งค่าการเชื่อมต่อแบบ ¼ bridge¹, ½ bridge¹ และ complete bridge¹;
13. Terminal สำหรับเชื่อมต่อกับ Strain Gauge;
14. Module HX711 แบบถอดได้;
15. Module Bluetooth HC-05 แบบถอดได้.
¹ วงจร Wheatstone Bridge;
² ค่าความคลาดเคลื่อน (Tolerance) ต่ำสุด 0.1% และ TCR ต่ำสุด ±10 ppm/°C.
รายการวัสดุและส่วนประกอบพร้อมข้อมูลโดยละเอียดสามารถดูได้จากคู่มือที่มีให้ดาวน์โหลดที่ www.e-structure.org
วิดีโอนี้อธิบายเกี่ยวกับ Hardware ของ ε-structure UNO
การพัฒนา Software บนมือถือ
Software ของระบบ ε-structure UNO ถูกพัฒนาผ่าน platform MIT App Inventor Beta 2 (http://ai2.appinventor.mit.edu หรือ http://appinventor.mit.edu), ซึ่งมีให้ใช้งานทั้งในรูปแบบไฟล์ติดตั้ง (apk) โดยขอจากผู้เขียน และไฟล์ที่แก้ไขได้ (aia) ใน MIT App Inventor Gallery (รูปที่ 4) ในการเข้าถึง Gallery คุณต้องมีบัญชี Gmail® ที่ใช้งานได้และเชื่อมต่อกับ Browser ของคุณ โดยแนะนำให้ใช้ Google® Chrome

ในการค้นหา Code ของ App จำเป็นต้องเข้าใช้งานผ่านลิงก์ต่อไปนี้: http://ai2.appinventor.mit.edu/?galleryId=5191132288516096 และรับชมวิดีโอต่อไปนี้
วิดีโอนี้อธิบายการสร้างไฟล์ App และการตั้งค่า Firebase server
รายละเอียดองค์ประกอบของ User Interface ถูกระบุไว้ตามหมายเลขในรูปที่ 5
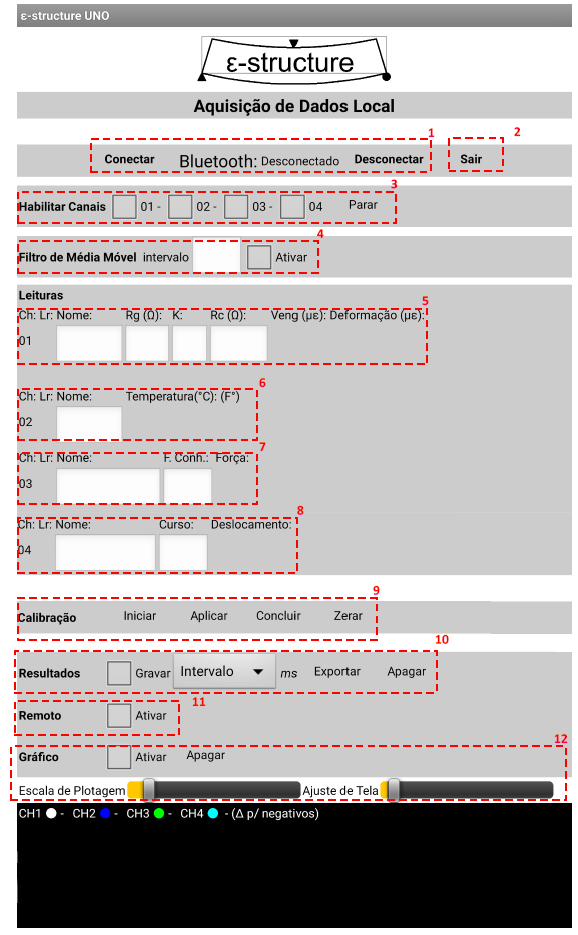
1. ปุ่ม Connect (Conectado) และ Disconnect (Disconectado) ช่วยให้คุณโต้ตอบกับ Module Bluetooth® ได้ รวมถึงตรวจสอบสถานะการเชื่อมต่อ (เชื่อมต่อแล้วหรือตัดการเชื่อมต่อ);
2. ปุ่ม Exit (Sair) ช่วยให้คุณออกจากหน้าจอ Local Acquisition เพื่อสิ้นสุดการรับข้อมูลและบันทึกข้อมูลลงในหน่วยความจำของอุปกรณ์ หากเลือกตัวเลือก Record (Gravar) (รายการที่ 12 - Results);
3. เลือก Channel ที่ต้องการให้อ่านค่าได้โดยใช้แต่ละ CheckBox ส่วนปุ่ม Stop (Sair) จะปิดการรับข้อมูล;
4. คุณสามารถใช้งาน Moving Average Filter ได้ก่อน โดยการใส่ช่วงค่าเฉลี่ย (ค่าตัวเลข) และเปิดใช้งานฟีเจอร์นี้โดยใช้ CheckBox ฟีเจอร์ Moving Average Filter นี้ไม่มีในไฟล์ "aia" ที่อยู่ใน MIT App Inventor Gallery เนื่องจากต้องติดตั้งส่วนขยายภายนอกที่ Gallery ไม่รองรับ
5. Ch หมายถึง channel ในกรณีนี้คือ Channel 01 ซึ่งทำหน้าที่อ่านค่า strain ส่วน Lr คือค่าที่อ่านได้สัมพัทธ์ (relative readings) ซึ่งเป็นจำนวนค่าที่ได้รับในหน่วย byte และยังไม่ได้แปลงเป็นค่า strain เฉพาะเจาะจง ใน TextBox Nome สามารถใส่ชื่อเรียกสำหรับการอ่านค่า strain นี้ได้ ใน TextBox Rg(Ω) ต้องใส่ค่าความต้านทานของ Strain Gauge ซึ่งปกติจะเป็นค่า 120, 350 และ 1000 ใน TextBox K ต้องใส่ค่า Gauge Factor Sensitivity Coefficient ใน TextBox Rc (Ω) ต้องใส่ค่าของ calibration resistor (Resistor Shunt) โดยควรตรวจสอบค่าของ Resistor นี้ด้วย multimeter ก่อนใส่ค่าลงไป ในปัจจุบัน Veng (με) คือค่าของ equivalent strain ที่คำนวณได้สำหรับการ Calibration ซึ่งเป็นวิธีการ Calibration ทางอ้อม (indirect calibration) และสุดท้าย Deformação (με) คือค่าสุดท้ายของ specific strain โดยที่ยังไม่ได้ใช้ Bridge Factor;
6. สำหรับ Channel 02 จะรับผิดชอบการอ่านค่า Temperature โดย Lr คือค่าที่อ่านได้สัมพัทธ์ ซึ่งค่าจะได้รับในหน่วยองศาเซลเซียส ใน TextBox Nome สามารถใส่ชื่อสำหรับการอ่านค่าอุณหภูมินี้ได้ โดยหน่วย (°C) คืออุณหภูมิในหน่วยเซลเซียส และองศา (°F) คืออุณหภูมิในหน่วยฟาเรนไฮต์;
7. Channel 03 รับผิดชอบการอ่านค่า Force โดย Lr คือค่าสัมพัทธ์ที่ได้รับในหน่วย byte และยังไม่ได้แปลงเป็น Force ใน TextBox Nome สามารถใส่ชื่อสำหรับการอ่านค่า Force นี้ได้ ใน TextBox F.Conh. จำเป็นต้องใส่ค่าแรงที่ทราบแน่นอน (ค่าตัวเลขโดยไม่ต้องระบุหน่วยวัด) ที่ให้กับ Load Cell ในเวลาที่เหมาะสมของการ Calibration ซึ่งทำโดยวิธีทางตรง (direct method) และสุดท้าย Força คือค่าสุดท้ายของแรง ในหน่วยวัดเดียวกับแรงที่ทราบค่าซึ่งใช้ในการ Calibration;
8. จากนั้น Channel 04 รับผิดชอบการอ่านค่า Displacement โดย Lr คือค่าสัมพัทธ์ที่ได้รับในหน่วย byte และยังไม่ได้แปลงเป็น Offset ใน TextBox Nome สามารถใส่ชื่อสำหรับการอ่านค่า Displacement นี้ได้ ใน TextBox Curso จำเป็นต้องใส่ค่าระยะชัก (travel course) ของ transducer (เช่น ค่าสูงสุดที่ transducer อ่านได้ เช่น 25 mm โดยใส่เพียงตัวเลขไม่ต้องระบุหน่วย) เพราะระยะนี้ต้องถูกเลื่อนด้วยมือในระหว่างกระบวนการ Calibration โดยวิธีทางตรง และสุดท้าย Deslocamento คือค่าสุดท้ายของ Displacement ในหน่วยเดียวกับระยะที่ใช้ในการ Calibration;
9. ส่วนนี้เกี่ยวกับวิธีการ Calibration (Calibração) ซึ่งสามารถเริ่มได้หลังจากกรอกข้อมูลในช่องของ Channel ที่เปิดใช้งานครบถ้วนแล้ว การ Calibration ทำได้โดยใช้ปุ่มดังนี้: หลังจากคลิก Start (Iniciar) ผู้ใช้ต้องให้แรงที่ทราบค่าค้างไว้ที่ Load Cell ด้วยมือ (หากเปิด Channel 03) และเลื่อน transducer ไปยังระยะสูงสุดค้างไว้ด้วยมือ (หากเปิด Channel 04) แล้วคลิก Apply (Aplicar) หลังจากนั้นต้องถอนแรงออกจาก Load Cell และเลื่อน transducer กลับไปที่ตำแหน่งเริ่มต้นก่อนการ Calibration เมื่อทำเสร็จแล้ว ให้คลิก Finish (Finalizar) แล้วคลิก Zero (Zerar) การ Calibration ควรเริ่มต้น (เมื่อใช้งาน Channel 1 และ/หรือ 3) หลังจาก Module HX711 ทำงานต่อเนื่องอย่างน้อย 3 (สาม) นาทีหลังจากต่อไฟเลี้ยงผ่าน Arduino ซึ่งต้องใช้เวลาประมาณนี้ที่อุณหภูมิห้อง 25 °C เพื่อให้เกิดความร้อนและทำให้ค่าที่อ่านได้คงที่ (stabilization) !!!!!!!!!!
10. นอกจากการดูค่าและการอ่านขนาด (Resultados) ของแต่ละ Channel แล้ว ข้อมูลยังสามารถจัดเก็บไว้ในอุปกรณ์ได้ ในการทำเช่นนี้ คุณต้องเลือกจำนวนการจัดเก็บข้อมูลต่อมิลลิวินาที (ms) โดยเลือกจากตัวเลือกใน SelectBox Range(Intervalo) หลังจากนั้นให้เลือก CheckBox Save (Gravar) เมื่อเสร็จสิ้น สามารถส่งออกค่าที่อ่านได้ในรูปแบบไฟล์ Comma Separated Values (CSV) เพื่อใช้ใน software ตารางคำนวณ เช่น MS Excel® ในกรณีนี้ เมื่อคลิก Export (Exportar) ระบบจะถามชื่อไฟล์ ซึ่งจะถูกเก็บไว้ใน root ของหน่วยความจำอุปกรณ์ สุดท้ายคือปุ่ม Delete (Apagar) ที่จะลบข้อมูลที่เก็บไว้ในอุปกรณ์ ซึ่งในตอนแรกข้อมูลจะไม่ถูกลบแม้ว่าจะมาจาก software ก็ตาม จะเกิดขึ้นก็ต่อเมื่อปุ่ม Delete(Apagar) ถูกใช้งาน;
11. การใช้งานฟีเจอร์ Remote (Remote) ช่วยให้อุปกรณ์สามารถแชร์ข้อมูลทั้งหมดที่ได้รับจากระบบแบบ real-time ผ่านอินเทอร์เน็ต (รูปที่ 6) ไปยังอุปกรณ์เครื่องที่สอง (smartphone หรือ tablet) ที่ติดตั้งแอปพลิเคชันเดียวกันได้ โดยเข้าใช้งานที่ "Remote Acquisition" (Aquisição Remota) ต้องเลือก CheckBox Enable (Ativar) ในทั้งสองแอปพลิเคชัน ฟีเจอร์นี้ใช้งานได้เฉพาะกับไฟล์ที่สร้างจาก App Inventor Gallery ตามที่อธิบายในข้อความนี้ เนื่องจากมีการตั้งค่า Firebase server เดียวกันกับ App Inventor
12. การใช้งาน Chart (Gráfico) สำหรับแสดงผลการอ่านข้อมูล สามารถใช้งานได้โดยเลือก CheckBox Activate (Ativar) การใช้ปุ่ม Delete (Apagar) จะล้างเส้นกราฟ อัตราส่วนของจุดข้อมูลสามารถปรับได้โดยใช้ตัวเลื่อนของฟังก์ชัน Plot Scale (Escala de Plotagem) และขนาดกราฟ Chart Size (Ajuste de Tela) สามารถเปลี่ยนได้โดยใช้ตัวเลื่อน
วิดีโอนี้อธิบายเกี่ยวกับ Software ของ ε-structure UNO
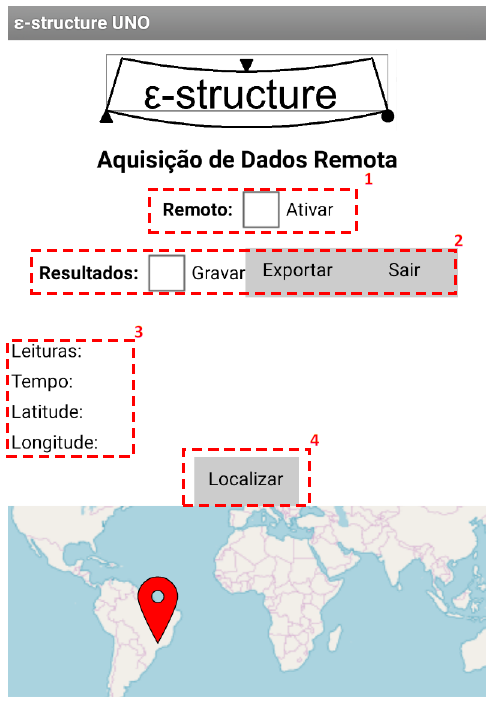
รายละเอียดองค์ประกอบของ User Interface ในหน้าจอ "Remote Acquisition" (Aquisição Remota) แสดงตามหมายเลขในรูปที่ 7:
1. ต้องเลือก CheckBox Enable (Ativar) และอุปกรณ์ต้องเชื่อมต่ออินเทอร์เน็ต;
2. ค่า Results (Resultados) ที่ได้รับจาก server สามารถเก็บไว้ในอุปกรณ์ได้โดยเลือก CheckBox Record (Gravar) เมื่อจบการทำงาน สามารถส่งออกค่าต่างๆ เป็นไฟล์ Comma Separated Values (CSV) เพื่อใช้ใน software ตารางคำนวณ เช่น MS Excel® ในกรณีนี้ เมื่อคลิกระบบ Export (Exportar) จะมีการถามชื่อไฟล์ซึ่งจะถูกเก็บไว้ใน root ของหน่วยความจำอุปกรณ์ ปุ่ม Exit (Sair) จะสิ้นสุดการเชื่อมต่อและปิดหน้าจอ;
3. ในทั้งสี่ช่องนี้ จะแสดงค่าที่อ่านได้ของแต่ละ Channel รวมถึงเวลาในรูปแบบ "MM/dd/yyyy hh:mm:ss a" และพิกัดทางภูมิศาสตร์ (Latitude และ Longitude) ของอุปกรณ์ที่อยู่ใกล้กับ hardware ε-structureUNO;
4. ปุ่ม Find (Localizar) ช่วยให้สามารถปักหมุดบนแผนที่ตามตำแหน่งพิกัดทางภูมิศาสตร์ที่ได้รับจาก server
การวัดค่า Strain
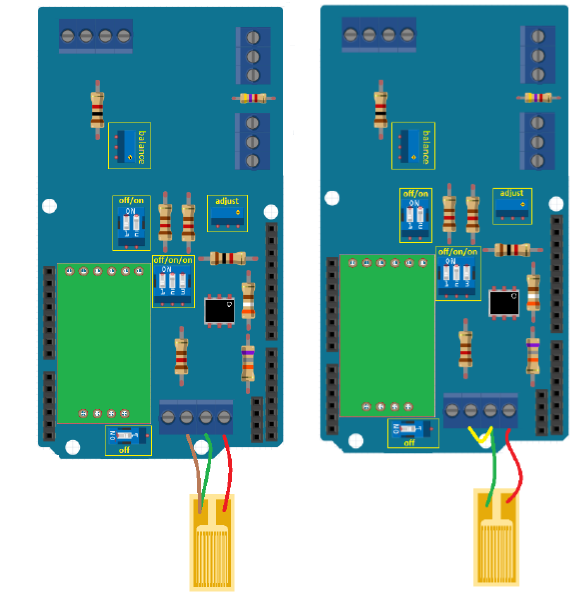
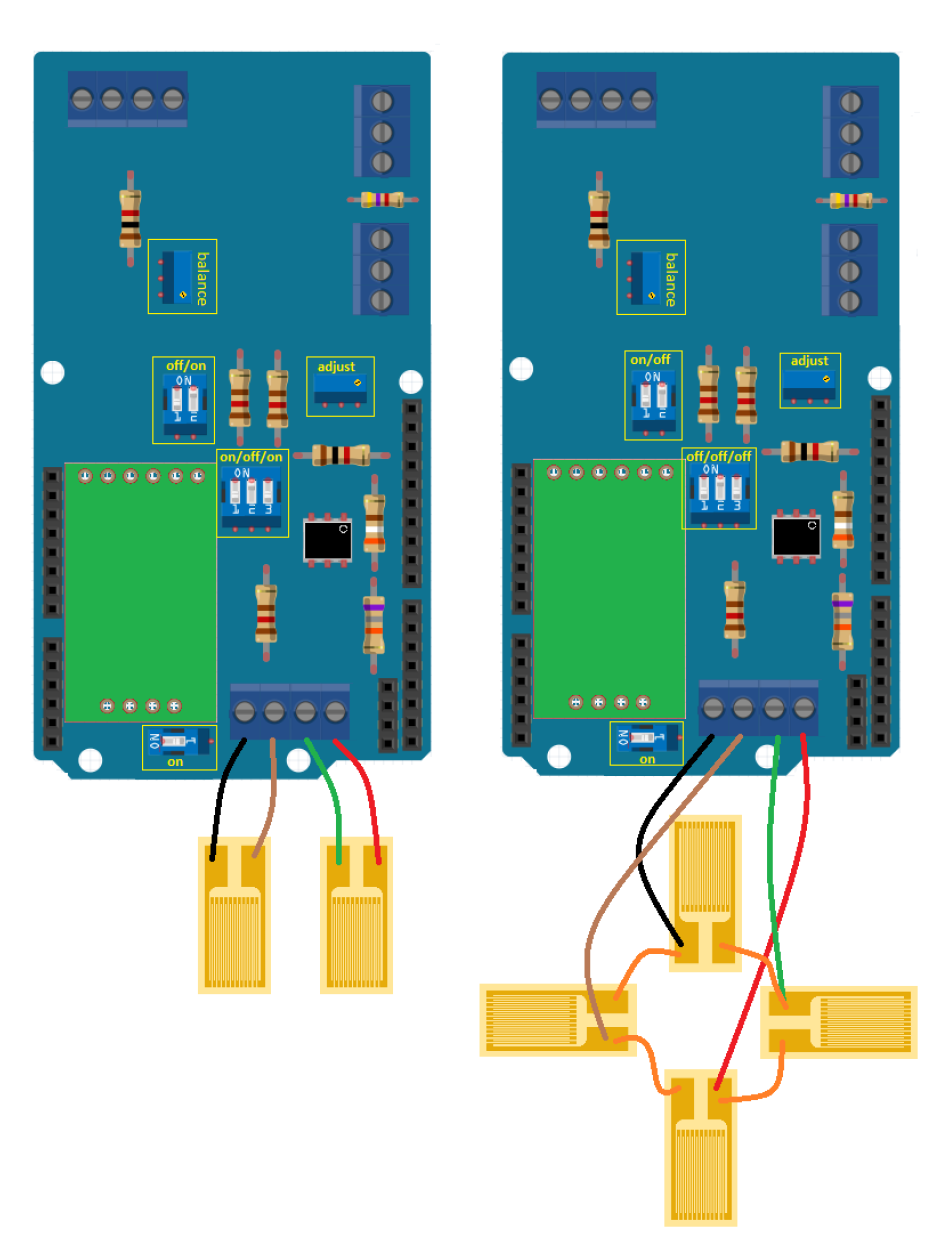
การใช้งาน Strain Gauges ในระบบ ε-structure UNO สามารถทำได้ทั้งการเชื่อมต่อแบบ ¼ bridge, ½ bridge และ full bridge ตามตัวอย่างการเชื่อมต่อในรูปที่ 8 และ 9 ซึ่งแสดงผังการเชื่อมต่อสายไฟ และระบุตำแหน่งของแต่ละขาใน DIP switches ที่ต้องใช้ในแต่ละกรณี
การจัดวาง Strain Gauges แบบ ¼ bridge, ½ bridge และ full bridge ตามตัวอย่างในรูปที่ 8 และ 9 ได้ถูกทดสอบแล้วในระบบ ε-structure UNO อย่างไรก็ตาม การจัดวางและรูปแบบการเชื่อมต่อ Strain Gauge แบบอื่นๆ อาจใช้งานได้ในระบบนี้ แต่จำเป็นต้องมีการทดสอบอย่างระมัดระวังเพื่อตรวจสอบการทำงาน
การปรับ (balance หรือ adjust) ของ trimpots (potentiometers) ต้องทำเมื่อจำเป็น โดยควรทำก่อนการ Calibration และปรับให้ค่าเป็นบวกใกล้เคียงศูนย์ (การอ่านค่า byte ของ Channel 1 และ 3 ที่ตรงกับ Module HX711) ซึ่งค่าจะยังอยู่ในหลักพัน หมายความว่าไม่สามารถทำให้เป็นศูนย์ได้อย่างสมบูรณ์
Resistor R1 (ในรูปที่ 1 - รายการที่ 10) ต้องมีความต้านทานเท่ากับ Strain Gauge ที่ใช้งาน ซึ่งปกติคือ 120Ω, 350Ω หรือ 1000Ω
วิดีโอสาธิตวิธีการใช้งาน ε-structure UNO ร่วมกับ Strain Gauge
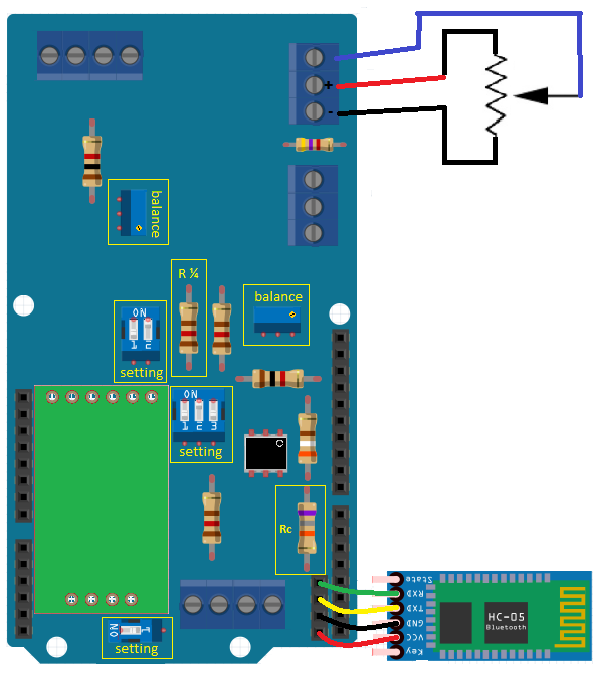
การวัดค่า Displacement
ระบบ ε-structure UNO รองรับ Displacement transducers ประเภท Potentiometers ค่าที่อ่านได้จะตรงกับ Channel 04 ของแอปพลิเคชัน และการเชื่อมต่อ transducer เข้ากับ hardware ควรทำตามที่แสดงในรูปที่ 10 รวมถึงการจัดวางสายไฟ + และ - ได้มีการทดสอบโดยใช้ transducer ขนาด 1KΩ และ 4.7KΩ การ Calibration ใช้วิธีทางตรงตามที่อธิบายไว้ก่อนหน้านี้ใน คู่มือ.
วิดีโอสาธิตวิธีการใช้งาน ε-structure UNO ร่วมกับ Displacement transducer
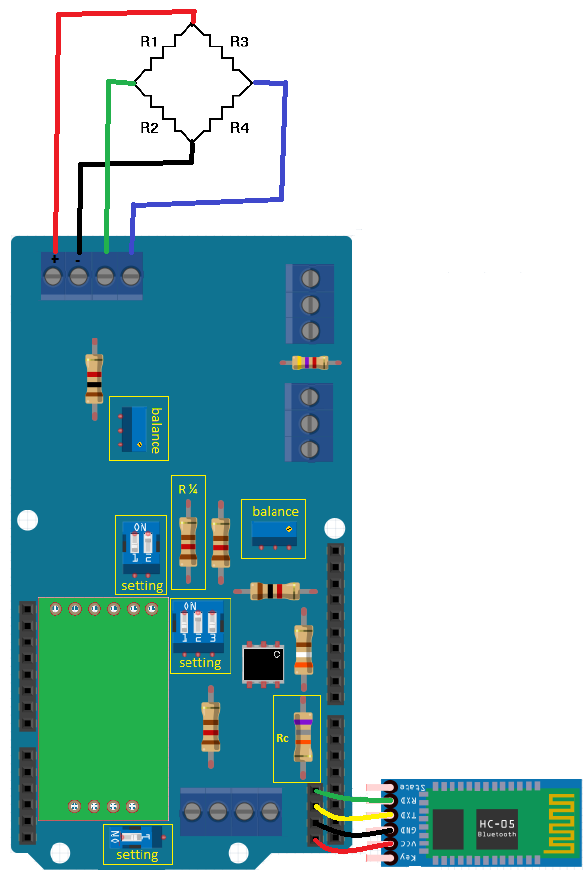
การวัดค่า Force
Load Cell สามารถใช้งานผ่าน Channel 03 โดยใช้ผังการต่อสายตามรูปที่ 11 ตัว Load Cell ต้องเป็นประเภท resistive เพื่อให้ใช้งานร่วมกับ Module HX711 ได้ การ Calibration ใช้วิธีทางตรงตามที่ได้อธิบายไว้ก่อนหน้านี้ใน คู่มือ.
วิดีโอสาธิตวิธีการใช้งาน ε-structure UNO ร่วมกับ Load Cell
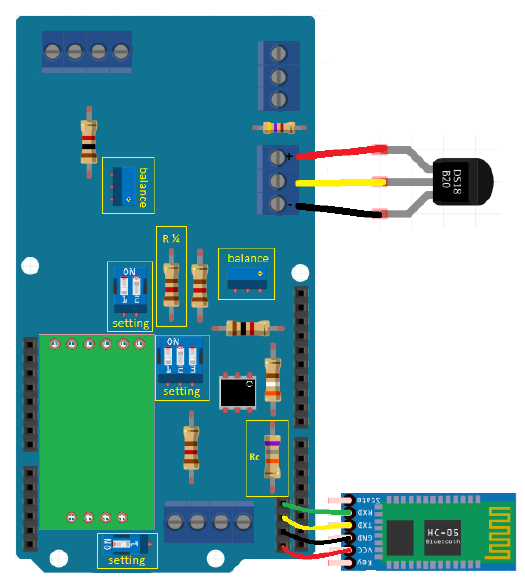
การวัดอุณหภูมิ
การวัดอุณหภูมิทำผ่าน Channel 2 และไม่จำเป็นต้องมี Calibration เนื่องจาก Temperature Sensor DS18B20 ให้ค่าอุณหภูมิเป็นองศาเซลเซียสอยู่แล้ว และ software จะทำหน้าที่เพียงแปลงเป็นองศาฟาเรนไฮต์ การเชื่อมต่อทำตามที่แสดงในรูปที่ 12 รวมถึงการจัดตำแหน่งขั้ว + และ -
วิดีโอสาธิตวิธีการใช้งาน ε-structure UNO ร่วมกับ Temperature Sensor DS-18B20
สามารถดาวน์โหลด คู่มือพื้นฐานสำหรับการสร้างและการใช้งาน ε-structureUNO ได้ที่ลิงก์ www.e-structure.org ซึ่งปัจจุบันมีเวอร์ชันภาษาอังกฤษและภาษาโปรตุเกส
ความร่วมมือของคุณเป็นสิ่งสำคัญมาก หากคุณพบสิ่งที่ต้องปรับปรุงหรือแก้ไขในเนื้อหานี้ โปรดติดต่อสอบถามได้
สนับสนุนเพื่อรับ Source Code หรือแอปพลิเคชันสำหรับโปรเจกต์นี้
ประเมิน Project
เอาฟอร์มยาวออกจากท้ายหน้า Project แล้ว เหลือเป็นปุ่มให้กดไปกรอกหน้าเดียว ตัวใหญ่ เว้นบรรทัดเยอะ อ่านง่ายกว่า
รีวิวจากคนใช้งานจริง
ถ้าเคยสั่งงาน เคยอ่านหน้านี้แล้วได้ประโยชน์ หรือมีข้อเสนอแนะ ฝากรีวิวไว้ได้เลย
ยังไม่มีรีวิวบนหน้านี้ ถ้าเคยใช้งานหรือมีข้อเสนอแนะ เขียนเป็นคนแรกได้เลย
